Vol.:(0123456789)
SN Applied Sciences (2021) 3:446 | https://doi.org/10.1007/s42452-021-04295-z
Research Article
Emergency evacuation simulation ofcommercial aircraft
Influence of body- and behaviour parameters
AndreasGobbin1 · RamanKhosravi2· AndreasBardenhagen1
Received: 24 September 2020 / Accepted: 28 January 2021 / Published online: 10 March 2021
© The Author(s) 2021 OPEN
Abstract
In order to receive certification approval for new products, aircraft manufacturers have to comply with the specifications
regarding cabin evacuation. In case of real evacuation trials, agent-based simulation can be deployed, as they are a less
cost-intensive mean of analysing passenger behaviour during the evacuation of commercial aircraft. This paper aims
at examining the suitability of agent-based simulation software to reproduce passenger behaviour during evacuation
processes. For this purpose, the algorithms and methods of the software PATHFINDER are introduced. Besides, the cabin
of a single aisle aircraft is reconstructed in a high-density configuration using software-specific tools. A representative
passenger distribution is implemented according to EASA regulations. Evacuation simulations for a single-aisle aircraft
are conducted taking EASA standards into account. The effect of vital parameters such as walking speed, body dimension,
conflict behaviour, collision response, acceleration time and exit allocation on evacuation times are examined. Results
are discussed and examined for plausibility in order to determine whether evacuation simulations of commercial aircraft
are possible using agent-based simulation software.
Keywords Evacuation simulation· Agent-based modelling· Human behaviour· Body characteristics· Conflict scenarios
List of symbols
Cg
Global cost factor (–)
Cl
Local cost factor (–)
Ctarget
Total cost factor (–)
F(x)
Functional value (–)
G(x)
Previous cost factor (–)
H(x)
Remaining cost factor (–)
dt
Distance travelled in room (m)
kd
Scaling factor for
kdd
(–)
kdd
Current room distance penalty (–)
kgt
Global travel time cost factor (s)
klt
Current room travel time cost factor (s)
kq
Current room queue time cost factor (s)
kqh
Is set to
1−p
for the most recently chosen target
and 1.0 for all other targets (–)
p
Current door preference scaling factor of travel
(–)
pd
Costs and global cost share (–)
tlt
Current room travel time (s)
tgt
Global travel time (s)
tq
Current room queue time (s)
A∗
A-star search algorithm
AFT Exit in the rear of the cabin
CD Comfort distance
CRT Collision response time
CS Certification specification
EASA European Union Aviation Safety Agency
FWD Exit in the front of the cabin
GUI Graphical user interface
NTSB National transportation safety board
* Andreas Gobbin, andreas[email protected]; Raman Khosravi, ramankhosravi@yahoo.de; Andreas Bardenhagen,
andreas[email protected] | 1Chair ofAircraft Design andAerostructures, Technische Universität Berlin, 10587Berlin,
Germany. 2Technische Universität Berlin, 10623Berlin, Germany.

Vol:.(1234567890)
Research Article SN Applied Sciences (2021) 3:446 | https://doi.org/10.1007/s42452-021-04295-z
OECD Organisation for economic co-operation and
development
OWE Over wing exit
PAX Persons approximately
1 Motivation
In addition to steadily increasing passenger numbers, air
traffic is also showing success in terms of safety. Compared
to the last 60years, the frequency of fatal incidents has
steadily decreased [1, p. 9 f.]. However, an analysis of 60
NTSB reports classified as survivable aircraft accidents
shows that 78% of the fatalities occurred after impact.
Of these, 95.4% were due to smoke inhalation and burns
caused by slow and inefficient evacuation procedures. In
contrast, immediate evacuation could increase survival
rates by 98% [2, p. 8]. This shows that rapid and successful
evacuation of the passenger cabin has a significant impact
on occupant safety and survival. Therefore, according to
the certification requirement, it must be demonstrated
that in the event of an emergency evacuation, it is pos-
sible to safely exit the aircraft within 90s. The exact word-
ing of EASA CS-25.803 (c) [3] states that an aircraft with a
seating capacity of more than 44 passengers must dem-
onstrate that the maximum seating capacity, including
the number of crew members, required by the operating
rules for which certification is sought, can be evacuated
from the aircraft to the ground within 90s under simulated
emergency conditions. Not more than half of the available
emergency exits may be used in this process [3, pp. 1-APP
J-1] (Appendix J, paragraph (p)). Compliance with this must
be proven by an actual demonstration using the test crite-
ria outlined in Appendix J of the CS-25, unless the agency
determines that a combination of analysis and testing pro-
vides equivalent data that would be obtained by an actual
demonstration [3] (Paragraph 25.803 (c)).
Because certification testing is associated with high
health risks to the test subject [4, p. 5], it should be con-
sidered whether agent-based numerical evacuation
simulations are a sufficient alternative to the specified
test procedure. In accordance with the last paragraph of
the approval paragraph CS-25.803 (c) [3], this paper aims
to investigate the influence of behavioural and conflict
parameters in agent-based simulation on the total evacu-
ation time. Using agent-based simulations, it is possible
to model evacuation scenarios under consideration of
human behaviour. This enables an analysis of passenger
behaviour in stressful situations and provides information
for the safe design of passenger cabins. The results of the
following considerations are intended to provide an initial
approach to which data and analyses might be used to
represent human behaviour in evacuation simulation.
In the last 20years, more and more simulation models
have been developed that allow to take human behaviour
into account. This has shifted the focus from a pure motion
simulation to an additional consideration of psychological,
social and physiological factors. With regard to competi-
tion-oriented behaviour during an evacuation situation,
the publication of Kirchner etal. [5] and the work on the
consideration of emotions by the Autonomous Agents and
Multiagent Systems Model of Toghar and Al Barghuthi [6]
as well as Miyoshi [7] are mentioned as examples.
Various simulation environments are available to simu-
late evacuation scenarios considering human behaviour
using agent-based algorithms. The three continuously
developed tools EXODUS from the University of Green-
wich [8], STEPS from Mott MacDonald Simulation Group
[9] and PATHFINDER by Thunderhead Engineering Con-
sultants, Inc. [10] were validated in the study by Cuesta
etal. [11, p. 241 ff.]. All abovementioned tools were able
to replicate real-life evacuation tests with good results,
although each of the tools has individual strengths and
weaknesses. It should be noted that only for the tool EXO-
DUS an explicit extension for evacuation simulations of
commercial aircraft (airEXODUS) [12] exists. When using
STEPS and PATHFINDER, the modelling must be adapted to
simulate aircraft evacuations. Further tools for evacuation
simulation of commercial aircraft are listed in the publica-
tion by Togher and Al Barghuti [6, p. 277 f.].
This paper shows the suitability of numerical simula-
tion for the evacuation of commercial aircraft by using
the simulation software PATHFINDER from Thunderhead
Engineering Consultants, Inc.
The subsequent section of this paper gives an overview
of the simulation software and examines the simulation
algorithms therein. Afterwards, the simulation procedure,
reference model and assumptions for this study are pre-
sented. In the fourth section, the influence of body char-
acteristics and parameters pertaining to conflict scenar-
ios are described and the results obtained are discussed.
Finally, the sensitivity of the evacuation time to variations
of behavioural patterns is evaluated based on the results
of the parameter study and the adequacy of the simulation
software PATHFINDER is assessed.
2 Simulation software andalgorithm
PATHFINDER is an agent-based simulation software in
which structures can be modelled by a two-dimensional
navigation geometry. This navigation geometry provides
the basis for the simulation of motion flows in a room. The
creation is done by rooms, that are connected by doors,
whereby any geometry can be replicated. The limitation
of the flow rates allows an individual adaptation of the
Vol.:(0123456789)
SN Applied Sciences (2021) 3:446 | https://doi.org/10.1007/s42452-021-04295-z Research Article
geometry as well as a realistic steering of the occupants
[13]. In PATHFINDER obstacles are not shown explicitly.
However, it is possible to provide free spaces in the navi-
gation geometry where no movement simulation of occu-
pants can be performed [10]. In order to assign individual
behaviour the individual occupants, so-called profiles
are used which can be defined via the GUI. This allows to
define characteristics like body dimension, movement
speed and conflict behaviour. Behavioural patterns are
used to define various instructions for occupants. Thus,
profiles and behaviours provide the possibility to classify
occupants. Figure1 shows the Graphical User Interface of
PATHFINDER.
The movement of an occupant to a specific destination
takes place in three steps: Path Planning, Path Generation
and Path Following. A path to a specific target is created
on the navigation geometry using the A* algorithm. The
actual simulation is performed in steering-mode, which
is using the method of inverse steering. For this purpose,
several potential directions of motion (sample directions)
are evaluated based on a cost objective function and the
most cost-efficient direction is selected [10].
The results of the simulation are analysed and evaluated
based on the total evacuation time, flow rates and number
of passes per exit. In addition, the evacuation process can
be animated and visualized, which enables an accurate
analysis of conflict situations and solutions.
2.1 Path planning
Path Planning describes the process that determines the
path to a goal. Each occupant has information about local
and global targets as well as the expected waiting time.
Since the shortest route does not necessarily represent the
fastest route, a cost calculation is made for each occupant
for the respective destinations. The principle “locally quick-
est” is applied in the context of Path Planning, in order to
determine the fastest route to an occupant’s destination.
The principle is based on the assumption that an occupant
has knowledge about the presence of a room’s doors and
the queues at these doors. Besides, an occupant knows the
distance from one of the doors to the occupant’s ultimate
destination. It is conceivable that a room has multiple local
targets (e.g. multiple doors) [10, p. 18]. In this case, the
least amount of time is regarded as the target function,
whereby each occupant is assigned the door with the low-
est cost. Based on this decision, the occupant’s path to this
door is generated. The total costs
Ctarget
to a goal result
from the summation of local and global costs [10, p. 19].
Fig. 1 Graphical User Interface of simulation software PATHFINDER
Vol:.(1234567890)
Research Article SN Applied Sciences (2021) 3:446 | https://doi.org/10.1007/s42452-021-04295-z
Cl
describes the local and
Cg
the global share of the
costs. The calculation of the individual cost elements is
given in formulas 2 to 5 [10, p. 19].
The factor
kd
in formula 5 is a function of the Current room
distance penalty
kdd
. If an occupant’s distance covered in a
room
dt
exceeds
kdd
, the costs related to the Current room
travel time
tlt
are doubled. When setting this value low, an
occupant would prefer covering lower distances to lower
travel times. The Current room travel time
tlt
describes the
time necessary to reach a target at maximum walking
speed. The Current room travel time cost factor
klt
is a fac-
tor used to control the significance of travel time related
costs. The factor
kd
and the distance travelled in a room
dt
are inputs for the factor
pd
which influences the local
Cl
and global
Cg
share of the costs. The Current room queue
time
tq
denotes a time estimate an occupant must wait at a
door as function of the occupant’s current position and the
door flow rate. The Current room queue time cost factor
kq
is a factor used to control the significance of the wait-time
related costs. The factor
kqh
can be calculated as a function
of the current door preference
p
. The current door prefer-
ence
p
controls the frequency of an occupant switching
its current goal. When set to 1, an occupant is prevented
from switching the initially chosen target, while for a value
below 1 it is free to switch its local target. The Global travel
time
tgt
represents the time an occupant needs to travel
from a local goal (e.g. a door) to a final exit (seek goal).
Similarly to the factors in formula 1, the factor
kgt
is used
to increase or decrease the significance of the associated
cost parameter
tgt
[10, p. 18].
2.2 Path generation
A path must exist for each local destination found by
path planning. To find this path, an A* search algorithm is
applied to a triangular navigation grid. Since A* belongs
to the class of complete and optimal algorithms, an opti-
mal solution is always found whenever a solution exists
[14, p. 104 ff.]. Furthermore, due to its optimal efficiency
(1)
Ctarget =Cl+Cg
(2)
Cl=max (pd
⋅
klt
⋅
tlt|kqh
⋅
kq
⋅
tq)
(3)
Cg
=
pd
⋅
kgt
⋅
tgt
(4)
pd
=e
k
d⋅
dt
(5)
k
d=
log(2)
kdd
property, there is no other algorithm that finds a faster
solution using the same heuristic.
The operation of the algorithm is based on the shortest
paths problem. To solve the problem, a cost calculation is
made for each waypoint on the grid based on an estima-
tion function. The heuristic applied here utilizes the linear
distance between the start and destination waypoints as
the lowest barrier. Since a connection between two points
is never shorter than the linear distance and thus does not
fall below the lowest barrier, A* always remains optimal in
this case [15, p. 13 f.]. A function value
F(x)
is allocated to
each known waypoint for optimal pathfinding. This speci-
fies how cost-intensive a path between the start and des-
tination waypoints is, especially by taking the waypoint
into consideration [14, p. 102].
In formula (6),
G(x)
denotes the costs incurred to reach
the waypoint under consideration from the origin.
H(x)
includes the remaining costs from the waypoint under
consideration to the target waypoint, which arise from
the previous heuristic.
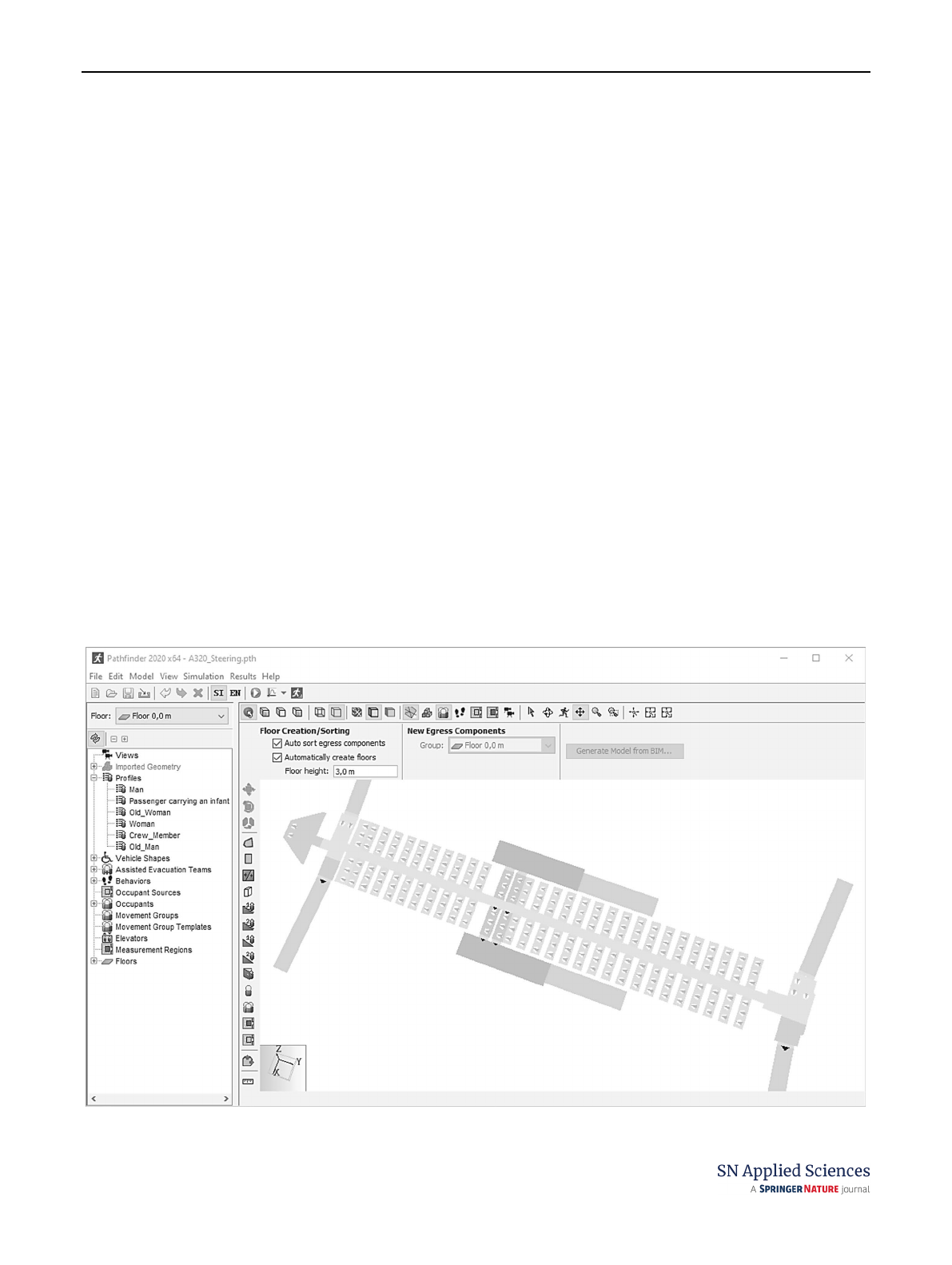
Because of the navigation mesh in use, there is no
straight path between the start and destination waypoints.
To ensure this, the so-called "string pulling" method is used
in addition to the A* algorithm [16]. Hereby, a smoothing
of the path is realized, whereby a real movement pattern
of the occupants is created. Figure2 shows the generated
path of an occupant based on the A* algorithm.
2.3 Path following
For following the path, a combination of inverse steer-
ing algorithm [17, p. 4 ff.] and collision handling is imple-
mented. This allows occupants to react to obstacles and
deviate from the path to reach the actual target [10]. The
inverse steering method evaluates several discrete motion
directions based on the angle between the old and new
path. Each new path is combined with the cost factors
resulting from speed loss, acceleration- and waiting time.
Finally, the path with the lowest cost factor is set as an
alternative path. If the cost factor of the original path is
(6)
F(x)=G(x)+H(x)
Fig. 2 Occupant’s path and waypoints on the mesh [10, p. 21]
Vol.:(0123456789)
SN Applied Sciences (2021) 3:446 | https://doi.org/10.1007/s42452-021-04295-z Research Article
lower in spite of the waiting time at the obstacle, the fol-
lowing is set on this remaining path [10].
Due to the specific steering behaviour, each occupant
has an individual behaviour for collision handling, by
which he/she has a direct influence on the cost evaluation
during the path finding. During the movement, each occu-
pant tries to keep a predefined behaviour with respect to
distance to walls or other occupants as well as his/her
speed when walking, avoiding and turning. As steering
also offers the possibility of assigning specific characteris-
tics such as age, panic behaviour and body dimensions, a
realistic evacuation under consideration of human behav-
iour is possible. Particularly with regard to the heteroge-
neous age distribution within a passenger cabin, steering
offers profound properties for depicting this. The advan-
tages and the resulting steering behaviours are shown and
discussed in the work of B. Schneider [18, p. 121]. The pos-
sible steering behaviours in terms of representing human
behaviour and their influence on path following are also
given. Due to the additional possibility of specifying
acceleration times and the maximum achievable walking
speeds as well as the individual adjustment of the reaction
time for resolving conflicts, it is possible to simulate any
class of age.
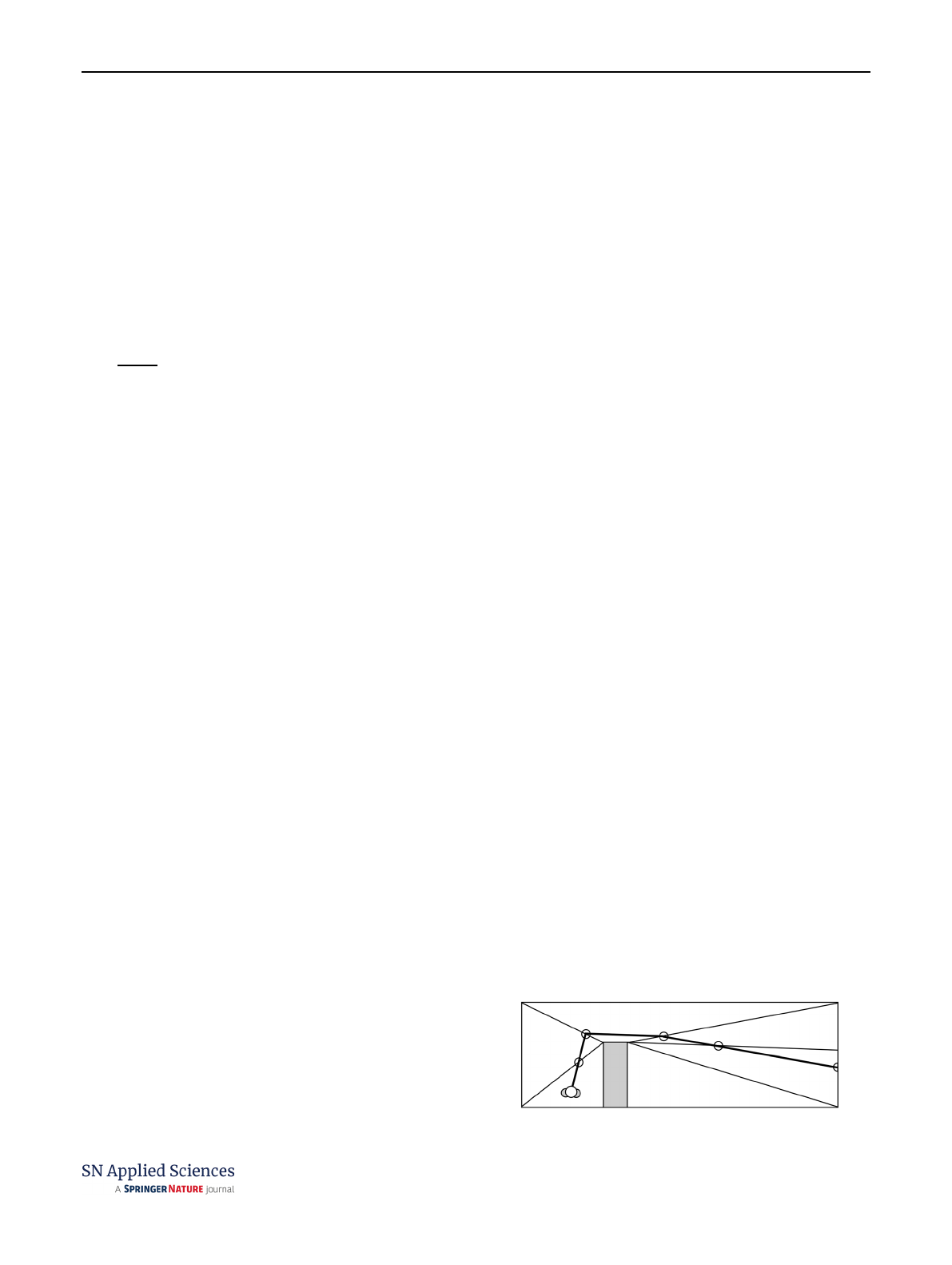
The following Fig.3 summarizes the three steps men-
tioned above and their respective approaches and meth-
ods for implementation. Also given are the influence
parameters of the inverse steering for description of the
human behaviour. A detailed explanation of these is pro-
vided in the work of B. Schneider [18].
3 Simulation procedure andreference
model
For the simulation of the evacuation process, a typical sin-
gle-aisle aircraft with a maximum number of passengers
of 180 and 7 crew members in high-density-configuration
is modelled. The navigation geometry is implemented by
rooms and doors, whereby the realistic design of seat rows,
cockpit, passenger aisle and emergency slides is possible.
The modelled cabin layout with emergency exits and
Fig. 3 Summary of the three steps path planning, -generation and -following and their respective influencing parameters, according to [19,
p. 19]
Loading more pages...