
This version is available at https://doi.org/10.14279/depositonce-11338
Copyright applies. A non-exclusive, non-transferable and limited
right to use is granted. This document is intended solely for
personal, non-commercial use.
Terms of Use
Berner, R., Vock, S., Schöll, E., & Yanchuk, S. (2021). Desynchronization Transitions in Adaptive
Networks. Physical Review Letters, 126(2). https://doi.org/10.1103/physrevlett.126.028301
© 2021 American Physical Society
Rico Berner, Simon Vock, Eckehard Schöll, Serhiy Yanchuk
Desynchronization Transitions in Adaptive
Networks
Accepted manuscript (Postprint)Journal article |

Desynchronization transitions in adaptive networks
Rico Berner1,2,∗Simon Vock1, Eckehard Sch¨oll1,3,4, and Serhiy Yanchuk2
1Institut f¨ur Theoretische Physik, Technische Universit¨at Berlin, Hardenbergstr. 36, 10623 Berlin, Germany
2Institut f¨ur Mathematik, Technische Universit¨at Berlin,
Straße des 17. Juni 136, 10623 Berlin, Germany
3Bernstein Center for Computational Neuroscience Berlin,
Humboldt-Universit¨at, Philippstraße 13, 10115 Berlin, Germany and
4Potsdam Institute for Climate Impact Research, Telegrafenberg A 31, 14473 Potsdam, Germany
(Dated: December 11, 2020)
Adaptive networks change their connectivity with time, depending on their dynamical state.
While synchronization in structurally static networks has been studied extensively, this problem
is much more challenging for adaptive networks. In this Letter, we develop the master stability
approach for a large class of adaptive networks. This approach allows for reducing the synchro-
nization problem for adaptive networks to a low-dimensional system, by decoupling topological and
dynamical properties. We show how the interplay between adaptivity and network structure gives
rise to the formation of stability islands. Moreover, we report a desynchronization transition and
the emergence of complex partial synchronization patterns induced by an increasing overall cou-
pling strength. We illustrate our findings using adaptive networks of coupled phase oscillators and
FitzHugh-Nagumo neurons with synaptic plasticity.
In nature and technology, complex networks serve as
a ubiquitous paradigm with a broad range of appli-
cations from physics, chemistry, biology, neuroscience,
socio-economic and other systems [1]. Dynamical net-
works are composed of interacting dynamical units, such
as, e.g., neurons or lasers. Collective behavior in dy-
namical networks has attracted much attention over the
last decades. Depending on the network and the specific
dynamical system, various synchronization patterns of
increasing complexity were explored [2–5]. Even in sim-
ple models of coupled oscillators, patterns such as com-
plete synchronization [6], cluster synchronization [7–11],
and various forms of partial synchronization have been
found, such as frequency clusters [12], solitary [13] or
chimera states [14–22]. In brain networks, particularly,
synchronization is believed to play a crucial role: for in-
stance, under normal conditions in the context of cogni-
tion and learning [23, 24], and under pathological condi-
tions, such as Parkinson’s disease [25], epilepsy [26–30],
tinnitus [31, 32], schizophrenia, to name a few [33]. Also
in power grid networks, synchronization is essential for
the stable operation [34–37].
The powerful methodology of the master stability func-
tion [38] has been a milestone for the analysis of syn-
chronization phenomena. This method allows for sep-
arating dynamical from structural features for a given
dynamical network. It drastically simplifies the problem
by reducing the dimension and unifying the synchroniza-
tion study for different networks. Since its introduction,
the master stability approach has been extended and re-
fined for multilayer [39], multiplex [40, 41] and hyper-
networks [42, 43]; to account for single and distributed
delays [44–49]; and to describe the stability of clustered
states [50–53]. The master stability function has been
used to understand effects in temporal [54, 55] as well as
adaptive networks [56] within a static formalism. Beyond
the local stability described by the master stability func-
tion, Belykh et. al. have developed the connection graph
stability method to provide analytic bounds for the global
asymptotic stability of synchronized states [57–60]. De-
spite the apparent vivid interest in the stability features
of synchronous states on complex networks, only little is
known about the effects induced by an adaptive network
structure. This lack of knowledge is even more surprising
regarding how important adaptive networks are for the
modeling of real-world systems.
Adaptive networks are commonly used models for
synaptic plasticity [61–66] which determines learning,
memory, and development in neural circuits. More-
over, adaptive networks have been reported for chemi-
cal [67, 68], epidemic [69], biological [70], transport [71],
and social systems [72, 73]. A paradigmatic example
of adaptively coupled phase oscillators has recently at-
tracted much attention [12, 41, 74–81], and it appears
to be useful for predicting and describing phenomena
in more realistic and detailed models [82–85]. Sys-
tems of phase oscillators are important for understanding
synchronization phenomena in a wide range of applica-
tions [86–88].
In this Letter, we report on a surprising desynchroniza-
tion transition induced by an adaptive network structure.
We find various parameter regimes of partial synchro-
nization during the transition from the synchronized to
an incoherent state. The partial synchronization phe-
nomena include multi-frequency-cluster and chimera-like
states. By going beyond the static network paradigm,
we develop a master stability approach for networks with
adaptive coupling. We show how the adaptivity of the
network gives rise to the emergence of stability islands
in the master stability function that result in the desyn-
chronization transition. With this, we establish a general
framework to study those transitions for a wide range of

2
dynamical systems. In order to provide analytic insights,
we use the generalized Kuramoto-Sakaguchi system on
an adaptive and complex network. Finally, we show that
our findings also hold for a more realistic neuronal set-
up of coupled FitzHugh-Nagumo neurons with synaptic
plasticity.
We consider the following general class of Nadaptively
coupled systems [12, 41, 74–80, 89]
˙
xi=f(xi)−σ
N
X
j=1
aijκijg(xi,xj),(1)
˙κij =−(κij +aijh(xi−xj)) ,(2)
where xi∈Rd,i= 1, . . . , N, is the d-dimensional dy-
namical variable of the ith node, f(xi) describes the lo-
cal dynamics of each node, and g(xi,xj) is the coupling
function. The coupling is weighted by scalar variables κij
which are adapted dynamically according to Eq. (2) with
the nonlinear adaptation function h(xi−xj). We assume
that the adaptation depends on the difference of the cor-
responding dynamical variables, similar to the neuronal
spike timing-dependent plasticity [62, 63, 90, 91]. The
base connectivity structure is given by the matrix ele-
ments aij ∈ {0,1}of the N×Nadjacency matrix Awhich
possesses a constant row sum r, i.e., r=PN
j=1 aij for all
i= 1, . . . , N. The assumption of the constant row sum
is necessary to allow for synchronization. The Laplacian
matrix is L=rIN−Awhere INis the N-dimensional
identity matrix. The eigenvalues of Lare called Lapla-
cian eigenvalues of the network. The parameter σ > 0
defines the overall coupling input, and > 0 is a time-
scale separation parameter. In particular, if the adapta-
tion is slower than the local dynamics, the parameter
is small.
Complete synchronization is defined by the N−1 con-
straints x1=x2=· · · =xN. Denoting the synchroniza-
tion state by xi(t) = s(t) and κij =κs
ij, we obtain from
Eqs. (1)–(2) the following equations for s(t) and κs
ij
˙
s=f(s) + σrh(0)g(s,s),(3)
κs
ij =−aijh(0).(4)
In particular, we see that s(t) satisfies the dynamical
equation (3), and κs
ij are either −h(0) or zero, if the cor-
responding link in the base connectivity structure exists
(aij = 1) or not (aij = 0), respectively.
To describe the local stability of the synchronous state,
we introduce the variations ξi=xi−sand χij =κij −
κs
ij. The linearized equations for these variations can be
written in a matrix form
˙
ξ
˙
χ=S−σB ⊗g(s,s)
−C ⊗Dh(0) −IN2ξ
χ,(5)
where ξ= (ξT
1,...,ξT
N)T,χ= (χ11, χ12, . . . , χNN )T
are Nd-dimensional and N2-dimensional vectors, respec-
tively,
S=IN⊗Df(s)
+σh(0) (rIN⊗D1g(s,s) + A⊗D2g(s,s)) ,
Dfand Dhare the Jacobians (d×dmatrix and 1×dma-
trix, respectively), D1gand D2gare the Jacobians with
respect to the first and the second variable, respectively,
and the constant matrices B(N×N2) and C(N2×N)
are given in [106].
System (5) is used to calculate the Lyapunov exponents
of the synchronous state; it possesses very high dimension
N2+Nd. However, the Jacobian matrix in (5) is sparse
with a large N2×N2block given by the simple diagonal
matrix −IN2. This implies that (5) possess N2−N
stable directions with Lyapunov exponents −. To find
these directions, we substitute (ξ,η) = e−t(ξ0,η0) into
(5) and obtain the linear system
S+INd −σB ⊗g(s,s)
−C ⊗Dh(0) 0 ξ0
χ0= 0.(6)
This system possesses at least N2−Nlinearly indepen-
dent solutions, since the matrix in (6) is degenerate due
to the large zero block [106].
Such a structure of the invariant subspaces in system
(5) allows for introducing new coordinates, which sep-
arate the N2−Nstable directions from the remaining
N(d+ 1) directions. With these new coordinates, we re-
duce the system’s dimension significantly. Moreover, as
in the classical master stability approach, we diagonal-
ize the N(d+ 1)-dimensional master system into blocks
of d+ 1 dimensions. Hence, the dynamics in each block
is described by the new coordinates ζand κwhich are
d- and one-dimensional dynamical variables, respectively.
For further details and the proof of the master stability
function, we refer to the Supplemental Material [106].
Our analysis shows that the coupling structure enters
just as a complex parameter µ, the network’s Laplacian
eigenvalue.
As a result, the stability problem is reduced to the
largest Lyapunov exponent Λ(µ), depending on a com-
plex parameter µ, for the following system
˙
ζ=Df(s) + σrh(0)D1g(s,s)
+ (1 −µ
r)D2g(s,s)ζ−σg(s,s)κ,
(7)
˙κ=−(µDh(0)ζ+κ).(8)
The function Λ(µ) is called master stability function.
Note that the first bracketed term in ζof (7) resem-
bles the master stability approach for static networks,
which, in this case, is equipped by an additional inter-
action representing the adaptation. Furthermore, the
shape of the master stability function depends on the
3
choice of σand rexplicitly. In case of diffusive coupling,
i.e., g(x,y) = g(x−y), the master stability function can
be expressed as Λ(σµ) such that the shape of Λ scales
linearly with the coupling constant σ.
To obtain analytic insights into the stability features
of synchronous states that are induced by an adaptive
coupling structure, we consider the following model of N
adaptively coupled phase oscillators [12, 76]
˙
φi=ω−σ
N
X
j=1
aijκij sin(φi−φj+α),(9)
˙κij =−(κij +aij sin(φi−φj+β)) ,(10)
where φirepresents the phase of the ith oscillator, ωis
its natural frequency which we set to zero in a rotating
frame. The phase-lag αcan be regarded as propagation
delay in the context of neuronal systems [92].
The synchronous state of (9)–(10) is given by s(t) =
(σr sin αsin β)tand κs
ij =−aij sin β. Using (7)–(8), the
stability of the synchronous state is described by the
quadratic characteristic polynomial
λ2+ (−σµ cos(α) sin(β)) λ−σµ sin(α+β)=0.
(11)
The master stability function for the synchronous solu-
tion is given as the maximum real part Λ = max Re(λ1,2)
of the solutions λ1,2of the polynomial (11). These solu-
tions λ1,2should be considered as functions of the com-
plex parameter µdetermining the network structure. It
is convenient, however, to use the parameter σµ in our
case.
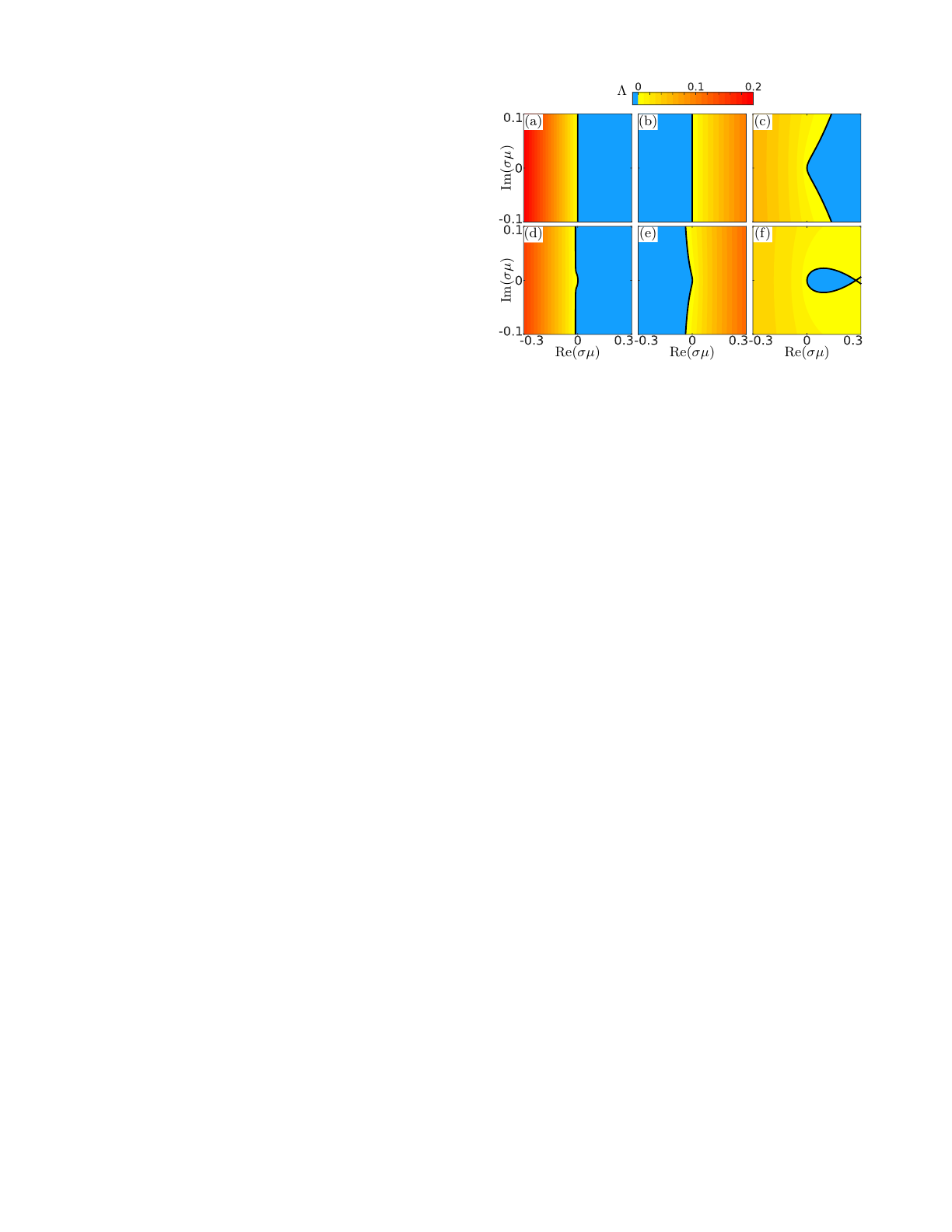
Figure 1 displays the master stability function deter-
mined for different adaptation rules controlled by β. The
blue-colored areas correspond to regions that lead to sta-
ble dynamics. By changing the control parameter β, var-
ious shapes of the stable regions are visible. For some
parameters, e.g., Fig. 1(c,d,e), almost a whole half-space
either left or right of the imaginary axis belongs to the
stable regime. This resembles the case of no adapta-
tion where the stability of the synchronous state is solely
described by the sign of the real part of σµ sin βcos α,
see Fig. 1(a,b). Note that in the case of no adaptation
(= 0) there exist N2neutral directions with zero eigen-
values that do not affect the stability, and correspond to
the variations of the coupling weights. We also find pa-
rameters where most values σµ correspond to unstable
dynamics, except for an island, i.e., a bounded region in
σµ parameter space, see Fig. 1(f).
To understand the emergence of the stability islands,
we analyze the boundary that separates the stable (Λ <
0) from the unstable region (Λ >0). This boundary is
given by the condition Λ = Reλ= 0, or, equivalently,
λ= iγ. Substituting this into Eq. (11), we obtain a pa-
rameterized expression for the boundary as a function
of γthat has the form σµ =Z(γ) with Z(γ) given ex-
plicitly in the Supplemental material [106]. The latter
(d) (e)
(a) (b)
Λ
Im(σµ) Im(σµ)
Re(σµ) Re(σµ)
(c)
(f)
Re(σµ)
FIG. 1. Master stability function Λ(σµ) for the adaptive
phase oscillator network (9)–(10). Regions belonging to neg-
ative Lyapunov exponents Λ are colored blue. The curve
where Λ(µ) = 0 is given as a black solid line. In panels (a)
and (b) the case without adaptation (= 0) is presented
for β=−0.35πand β= 0.2π, respectively. Other panels:
= 0.01 and (c) β=−0.95π, (d) β=−0.35π, (e) β= 0.2π,
and (f) β= 0.98π. In all panels α= 0.3π.
parametrization of the boundary is displayed in Fig. 1 as
the solid black line. It is straightforward to show that a
stability island exists if sin(α+β)/(cos αsin β)<0. The
latter condition indicates a certain balance between the
coupling and adaptation function. We emphasize that
the emergence of stability islands is a direct consequence
of adaptation. Without adaptation, the boundary sim-
plifies to the axis Re µ= 0, see Figs. 1(a,b). Intuitively,
the presence of adaptivity, i.e., Eq. (8), provides a feed-
back mechanism that can change the stability (e.g., by
an additional effective phase lag), and hence gives rise to
the emergence of stability islands of the master stability
function.
In the following, we analyze the behavior of the adap-
tive network of phase oscillators (9)–(10) in the presence
of a stability island, and show how such an island in-
troduces a desynchronization transition with increasing
overall coupling σ. To measure the coherence, we use the
cluster parameter RC[76, 79], which is given by the num-
ber of pairwise coherent oscillators normalized by the to-
tal number of pairs N2. In the case of complete synchro-
nization, frequency clustering, or incoherence, the cluster
parameter values are RC= 1, 1 < RC<0, or RC= 0,
respectively, see Supplemental Material for details [106].
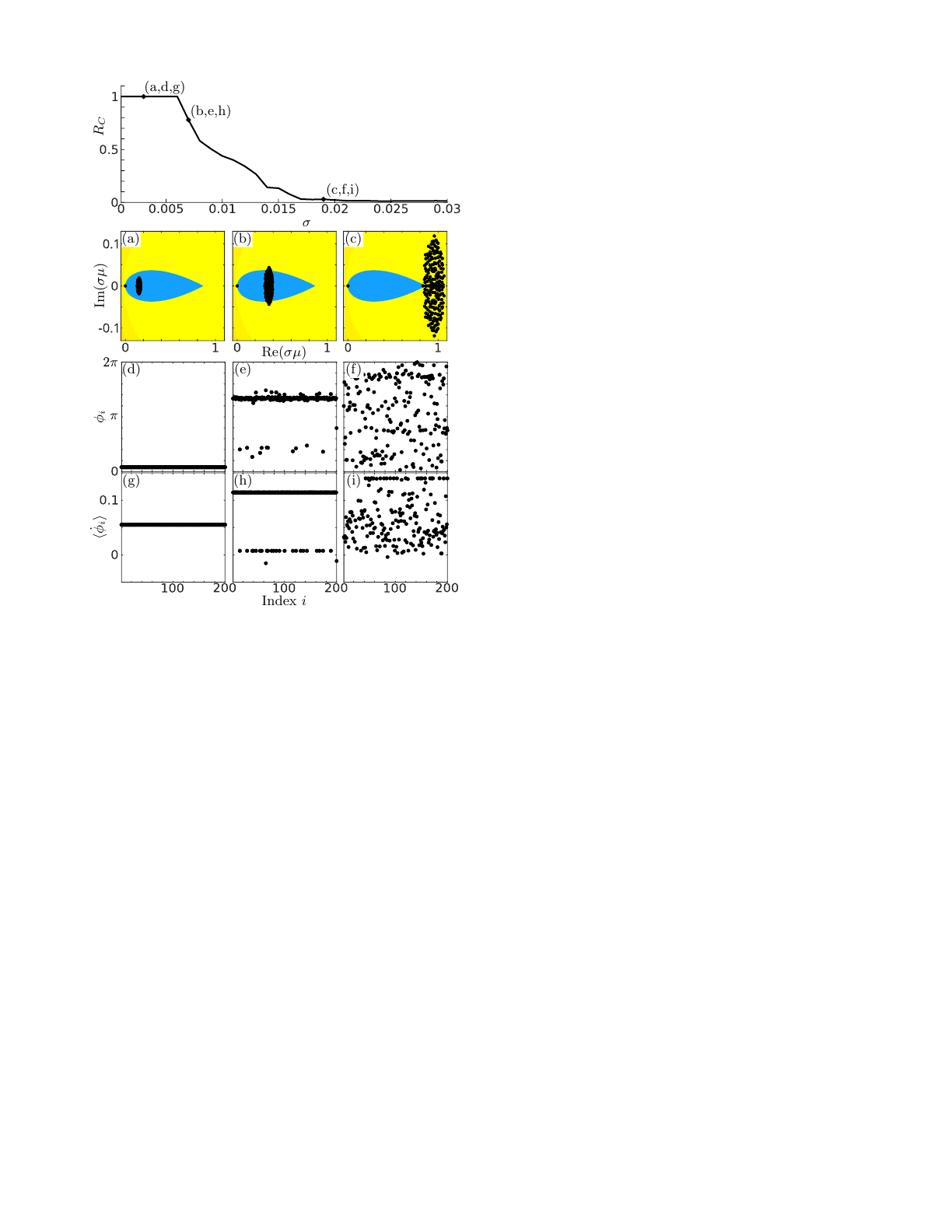
The top panel in Fig. 2 shows the cluster parameter
RCfor different values of the overall coupling constant
σ. We observe that for small σ, the synchronous state
is stable, see Fig. 2(a,d,g). This stability follows directly
from the master stability function since all values σµifor
all Laplacian eigenvalues lie within the stability island,
see Fig. 2(a).
4
(g) (h) (i)
Index i
(d) (e) (f)
Re(σµ)
(b)(a) (c)
σ
(a,d,g)
(b,e,h)
(c,f,i)
φi
h˙
φiiRC
Im(σµ)
FIG. 2. Dynamics in the network of 200 oscillators (9)–(10)
with random adjacency matrix Ac[106], and different val-
ues of overall coupling strength σ. Adiabatic continuation for
increasing σwith the stepsize of 0.001, starting with the syn-
chronous state φi= 0, κij =−aij sin β. The top panel shows
the cluster parameter RCvs σ. For the three values of σ:
(a,d,g) σ= 0.003, (b,e,h) σ= 0.007, and (c,f,i) σ= 0.019,
the plots show: in (a,b,c) the master stability function color
coded as in Fig. 1, together with σµi, where µiare the N
Laplacian eigenvalues of Ac; in (d,e,f) snapshots for φiat
t= 30000; and in (g,h,i) the temporal average of the phase
velocities h˙
φiiover the last 5000 time units. Other parame-
ters: α= 0.49π,β= 0.88π,= 0.01.
By increasing the coupling strength σ, the values σµi
move out of the stability island (µiremain the same), and
the synchronous state becomes unstable, see Fig. 2(b,c).
For intermediate values of σ, multiclusters with hierar-
chical structure in the cluster size emerge, see Fig. 2(e,h)
for a three-cluster state. Increasing the coupling con-
stant further leads to the emergence of incoherence. In
Fig. 2(f,i), the coexistence of a coherent and an inco-
herent cluster is presented. Such chimera-like states
have been numerically studied for adaptive networks in
[76, 78, 79].
In the following, we show how our findings are trans-
ferred to a more realistic set-up of coupled neurons with
synaptic plasticity. For this, we consider a network
of FitzHugh-Nagumo neurons [93–96] coupled through
chemical excitatory synapses [97–99] equipped with plas-
ticity. The form of the synaptic plasticity is similar to
the rules used in [84, 100], with control parameters β1
and β2of the adaptation function which are uniquely
determined by the values of h(0) and Dh(0) of the plas-
ticity rule, and these are the only essential parameters
of the plasticity function, regarding the stability of the
synchronous state, see Eqs. (7)–(8). For more details on
the model, we refer to [99, 106].
The synchronous state of the network of FitzHugh-
Nagumo neurons satisfies Eqs. (3)–(4), and it is periodic
for the chosen parameter values. Using our extended
master stability approach, we determine numerically the
master stability function which is the maximum Lya-
punov exponent of Eqs. (7)–(8).
In Fig. 3(a,b,c), we show the master stability function
in dependence on the parameter µ/r for different values
of the overall coupling constant σ. We observe a sta-
bility island for the chosen set of parameters, see the
Supplemental material for other parameter values [106].
In contrast to the phase oscillator network in Fig. 2, the
shape of the master stability function does not scale lin-
early with σ. This is due to the non-diffusive coupling
function, see [106] for details. Moreover, with increasing
σ, the size of the stability island shrinks. Since all Lapla-
cian eigenvalues µiare independent of σ, we observe that
µi/r move out of the stability island with increasing σ.
For the globally coupled network, in particular, we have
either µi/r = 0 or µi/r = 1. Therefore, with increas-
ing σ, we find a transition from complete coherence, see
Fig. 3(a,d,g) to partial synchronization and incoherence.
We further observe that closely after destabilization, a
large frequency cluster remains visible, see Fig. 3(b,e,h).
For higher overall coupling, the cluster sizes shrink, and
the number of small clusters increases, see Fig. 3(c,f,i).
In summary, we have developed a master stability ap-
proach for a general class of adaptive networks. This
approach allows for studying the subtle interplay be-
tween nodal dynamics, adaptivity, and a complex net-
work structure. The master stability approach has been
first applied to a paradigmatic model of adaptively cou-
pled phase oscillators. We have presented several typ-
ical forms of the master stability function for different
adaptation rules, and observed adaptivity-induced sta-
bility islands. Besides, we have shown that stability is-
lands give rise to the emergence of multicluster states and
chimera-like states in the desynchronization transition
for an increasing overall coupling strength. Qualitatively
the same phenomena have been shown for a more realis-
tic network of non-diffusively coupled FitzHugh-Nagumo
neurons with synaptic plasticity. In this set-up, the emer-
gence of a stability island and a desynchronization tran-
sition have been found as well.
The theoretical approach introduced in this Letter pro-
Loading more pages...