
Frontiers in Psychology 01 frontiersin.org
Evaluation of an assistance
system supporting older
pedestrians’ road crossing in
virtual reality and in a real-world
field test
Rebecca Wiczorek * and Janna Protzak
Research group FANS, Department of Psychology and Ergonomics, Technische Universität Berlin,
Berlin, Germany
Older pedestrians are at a high risk of becoming victims of car accidents
because they tend not to pay sufficient attention to upcoming traffic. Within
our research project, an assistance system for older pedestrians has been
developed. It detects the street and communicates with the users through a
vibrotactile interface. Two evaluation studies have been carried out in order to
understand the potential benefits and drawbacks of the developed assistance
system. One study was conducted in a virtual environment (VR) with 23
participants, aged 65+. The other experiment was a field test in a real street
environment with 26 participants, aged 65+. Objective dependent variables in
both experiments were checking for traffic (operationalized via head tracking)
and stopping in front of the street (VR study), i.e., approaching time (field test).
Workload and acceptance served as subjective dependent variables. Analysis
of the VR experiment showed significantly more head rotation with the
assistance system than without it, as well as significantly more with cars than
without cars. The same was true for the frequency of stopping. No significant
difference was found concerning workload. With regard to acceptance, the
majority of participants indicated that the system was supportive and able
to reduce risks in traffic. In the field test, results for head rotation confirmed
the findings of the VR study. Analysis showed a marginally significant higher
head rotation frequency with the alarm system than without, and significantly
different patterns of checking for traffic at marked and unmarked crossings.
However, unlike in the VR study, no differences were found in approaching
time with and without the assistance system. Approaching time was slower at
marked crossings. No difference was found with regard to workload, meaning
the use of the assistance system did not increase the subjectively perceived
workload of participants. Analysis of the acceptance questionnaire showed
a positive attachment to the assistance system. However, most reported
that they did not experience any advantage from the use of the system, and
expressed no intention to buy such a system for themselves.
KEYWORDS
older pedestrians, assistance system, road crossing, virtual reality, field study
TYPE Original Research
PUBLISHED 20 December 2022
DOI 10.3389/fpsyg.2022.966096
OPEN ACCESS
EDITED BY
Evellin Cardoso,
Universidade Federal de Goiás, Brazil
REVIEWED BY
Luca Brayda,
Nextage Inc., Italy
Mihoko Niitsuma,
Chuo University,
Japan
*CORRESPONDENCE
Rebecca Wiczorek
SPECIALTY SECTION
This article was submitted to
Human-Media Interaction,
a section of the journal
Frontiers in Psychology
RECEIVED 10 June 2022
ACCEPTED 21 November 2022
PUBLISHED 20 December 2022
CITATION
Wiczorek R and Protzak J (2022) Evaluation
of an assistance system supporting older
pedestrians’ road crossing in virtual reality
and in a real-world field test.
Front. Psychol. 13:966096.
doi: 10.3389/fpsyg.2022.966096
COPYRIGHT
© 2022 Wiczorek and Protzak. This is an
open-access article distributed under the
terms of the Creative Commons Attribution
License (CC BY). The use, distribution or
reproduction in other forums is permitted,
provided the original author(s) and the
copyright owner(s) are credited and that
the original publication in this journal is
cited, in accordance with accepted
academic practice. No use, distribution or
reproduction is permitted which does not
comply with these terms.

Wiczorek and Protzak 10.3389/fpsyg.2022.966096
Frontiers in Psychology 02 frontiersin.org
Introduction
Older pedestrians are at a high risk of becoming victims of car
crashes, as official statistics show [Statistisches Bundesamt
(Destatis), 2020, 2021]. In 2019, around 20% of the victims of car
crashes in Germany were 60 years and older. Moreover, their risk
of dying as a result of an accident is three times higher compared
to younger victims, which is due to their higher fragility. Seventy-
eight percent of the accidents involving older pedestrians were
caused by the older pedestrians. The official statistics also indicate
an important reason for older pedestrians’ higher involvement in
such accidents: In more than half of the cases, the older pedestrians
did not pay sufficient attention to the upcoming traffic.
Prior research supports the conclusion that insufficient
attention paid to traffic is prevalent and offers some explanations.
One important reason for a lack of attention to traffic is
engagement in parallel visual tasks. Two laboratory experiments
(Zito etal., 2015; Tapiro etal., 2016) indicate higher frequencies
of checking the ground for obstacles in older compared to younger
pedestrians. Avineri etal. (2012) found a correlation between this
ground checking behavior and a fear of falling, which increases
with age (Tinetti etal., 1994; Schott, 2008). Further, Wiczorek and
Protzak (2022) show the negative impact of visual and cognitive
tasks on hazard perception in a road crossing simulation.
Another reason for insufficient attention paid to upcoming
traffic is engagement in parallel motor tasks, namely in walking.
An observation study and a photo-based questionnaire (Wiczorek
etal., 2016) suggests that both younger and older pedestrians do
not usually stop in front of a street to check for traffic. Instead,
they tend to keep walking and move their heads to check for traffic
while approaching the street. In an EEG-experiment using a dual-
task paradigm of combined real over ground walking and visual
signal detection, it was found that the number of missed visual
signals did significantly increase from standing to walking, but
only for older participants (Protzak etal., 2021).
Within the research group FANS, an assistance system has been
developed with the aim to support older pedestrians’ road crossing.
The system was developed to detect the street rather than
approaching cars because the latter is not possible yet. In order to
detect an approaching car, the sensors used for the system need a free
field. In a lot of urban street environments, this is not possible due to
obstacles such as trees, poles and, most importantly, parked cars. If,
in the future, cars are capable of car-to-car communication or, in this
case, car-to-device communication, detection of approaching cars
will bea helpful way to increase the safety of pedestrians.
However, the aim of the current system is to detect the street and
to remind the users to refrain from any parallel activities, namely, to
stop checking the floor and to stop walking. Instead, they should
focus their whole attention on the traffic. Detection of the street has
been realized through a combination of sensor fusion and machine
learning (Qureshi etal., 2018; Qureshi and Wizcorek, 2019). The
system, which is mounted to a walking frame, detects the curb stone
using a webcam in addition to an infrared-based LEDDAR sensor.
The detection rate has been optimized using CNN algorithms up to
an efficiency of more than 99%. The system was trained to detect
only the kerbstone between the pathway and the street when
approaching the street, but not the kerbstone between the street and
the pathway on the other side of the road.
Three different interfaces (auditory, thermotactile, and
vibrotactile) have been investigated in a laboratory experiment
with older participants (Wiczorek, under review).
1
The one that
was both efficient and had a high acceptance rate by the older
people was the vibrotactile interface. The vibrotactile interface was
realized through vibrating cuffs, worn at the upper arms. This
placement was chosen to direct users’ attention as close to the
traffic as possible when their first reaction is a shift of attention to
the application of stimulus (Bradley, 2009).
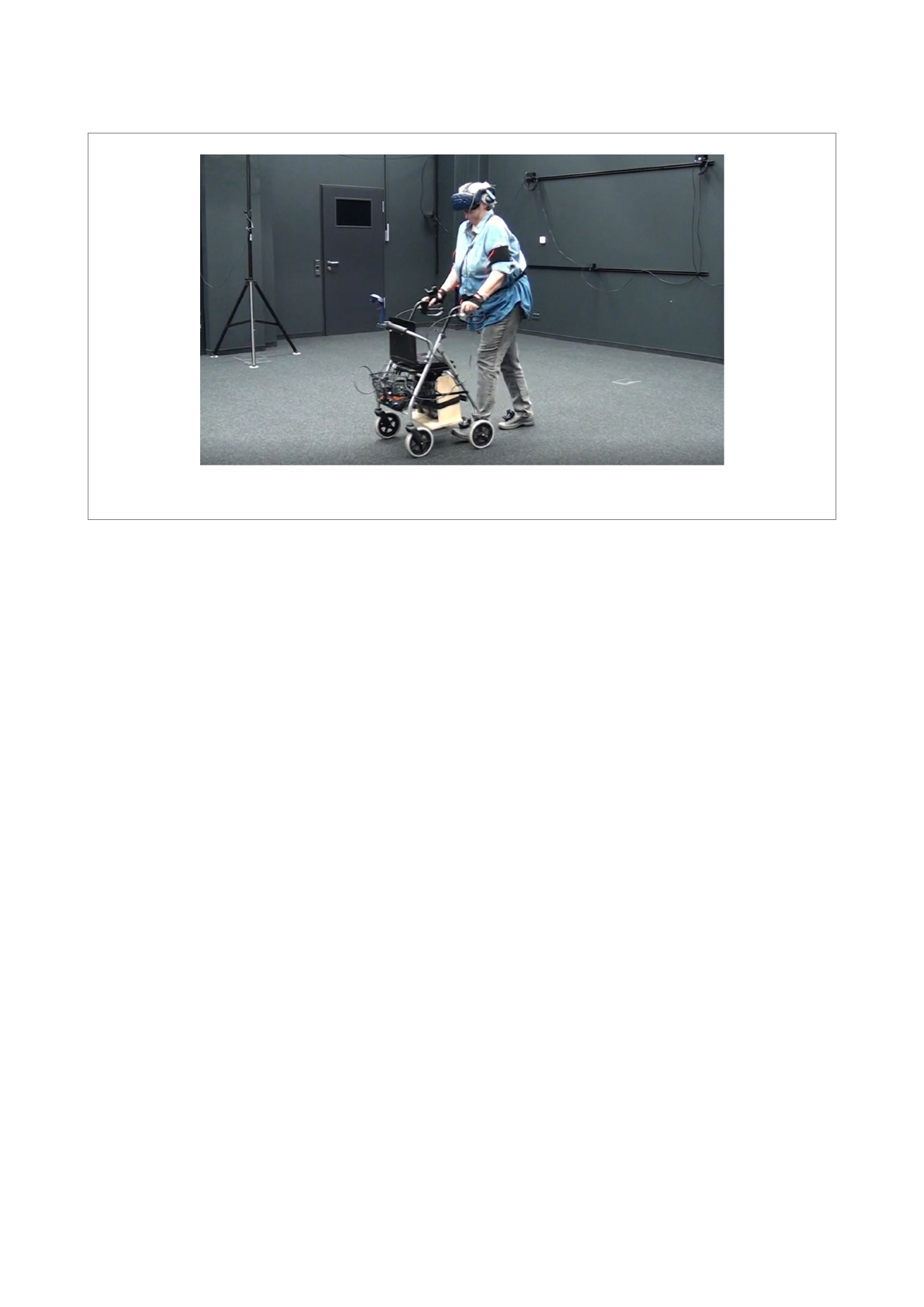
The prototype of the assistance system is shown in Figure1.
In two experiments, the assistance system was evaluated regarding
its efficiency to increase safety during road crossing as well as with
regard to the subjective workload and acceptance of the system.
The first experiment was conducted in a virtual reality (VR)
environment, and the second one was a field test.
VR evaluation study
For a long time, pedestrian simulation has been mainly video-
based and offered no or only short walking options. Since VR
technology is evolving, more sophisticated pedestrian simulators
have been developed, using head-mounted VR technologies.
These simulation environments have a higher coupling of
perception and action and allow for real walking. For a review see
Feldstein etal. (2018).
The advantage of highly immersive VR experiments compared
to video-based simulation environments is that they are much more
realistic and, thus, provide results closer to real-life behavior. VR
experiments allow for exposure of participants to traffic, without
putting them in actual danger. Furthermore, they are more controlled
than field tests. However, it has been shown that even with high
fidelity simulation, participants still do not exactly behave as in real-
world experiments (Feldstein etal., 2016). That is why wedecided to
combine both approaches, one controlled VR setting with actual
traffic and one field test in a very quiet zone with little traffic.
The aim of the VR experiment was to investigate the behavior
of older participants while road crossing with and without the
assistance system. They walked up and down a 10 m long track
and, during the walking, were presented with two different street
scenarios. For their own safety, they were equipped with a walking
frame during the whole experiment. The experiment was split into
two parts, one where the assistance system was activated, and
another one with the system turned off.
In both experiments, frequency of turning the head to the left
and the right, stopping in front of the street, i.e., approaching time,
1 Wiczorek, R. (under review). Evaluation of thermotactile and vibrotactile
cues to improve hazard perception of older pedestrians.
Wiczorek and Protzak 10.3389/fpsyg.2022.966096
Frontiers in Psychology 03 frontiersin.org
workload measures, and acceptance questions served as dependent
variables. It was expected that older pedestrians would stop more
often and move their heads more often when using the system than
when not using it. The workload measure was done to check
whether the assistance system would increase the workload as an
unintended side effect. No explicit hypotheses regarding acceptance
questions were made. They rather served to learn more about
participants’ attitudes towards the assistance system.
Materials and methods
“Ethik-Kommission des Instituts für Psychologie und
Arbeitswissenschaft (IPA) der TU Berlin” approved the study
under the name: “VR-Studie zur Wirksamkeit eines vibro-taktilen
Assistenzsystems für die Straßenquerung“(serial numbers
WI_06_20180817). All procedures were performed in accordance
with the Declaration of Helsinki, in compliance with relevant laws
and institutional guidelines. Written informed consent was
obtained from each participant and privacy rights were observed.
Participants
Twenty-three older subjects between the age of 65 and 83
(M = 73.3; SD = 5.6) were included in the analysis of this study. Ten
of them were male and 13 were female. They all walked on foot on
a regular basis. Participants were recruited via a participant tool
of the research group fans. For participation, they received a
compensation of 12€ per hour.
Research environment
The experiment took place in the “Berlin Mobile Brain/Body
Imaging Lab” (BeMoBIL) of the Dep. of Biological Psychology and
Neuroergonomics, Technische Universität Berlin. Participants
wore HTC VIVE VR glasses and were additionally equipped with
five trackers (feet, hands, and belly). The trackers and the glasses
were tracked by a room-wide installed camera system. Figure1
presents a participant with HTC VIVE during the experiment.
The scenarios were programmed with Unity. The VR scenes
covered a 10 m × 5 m corridor. Two street scenarios had been
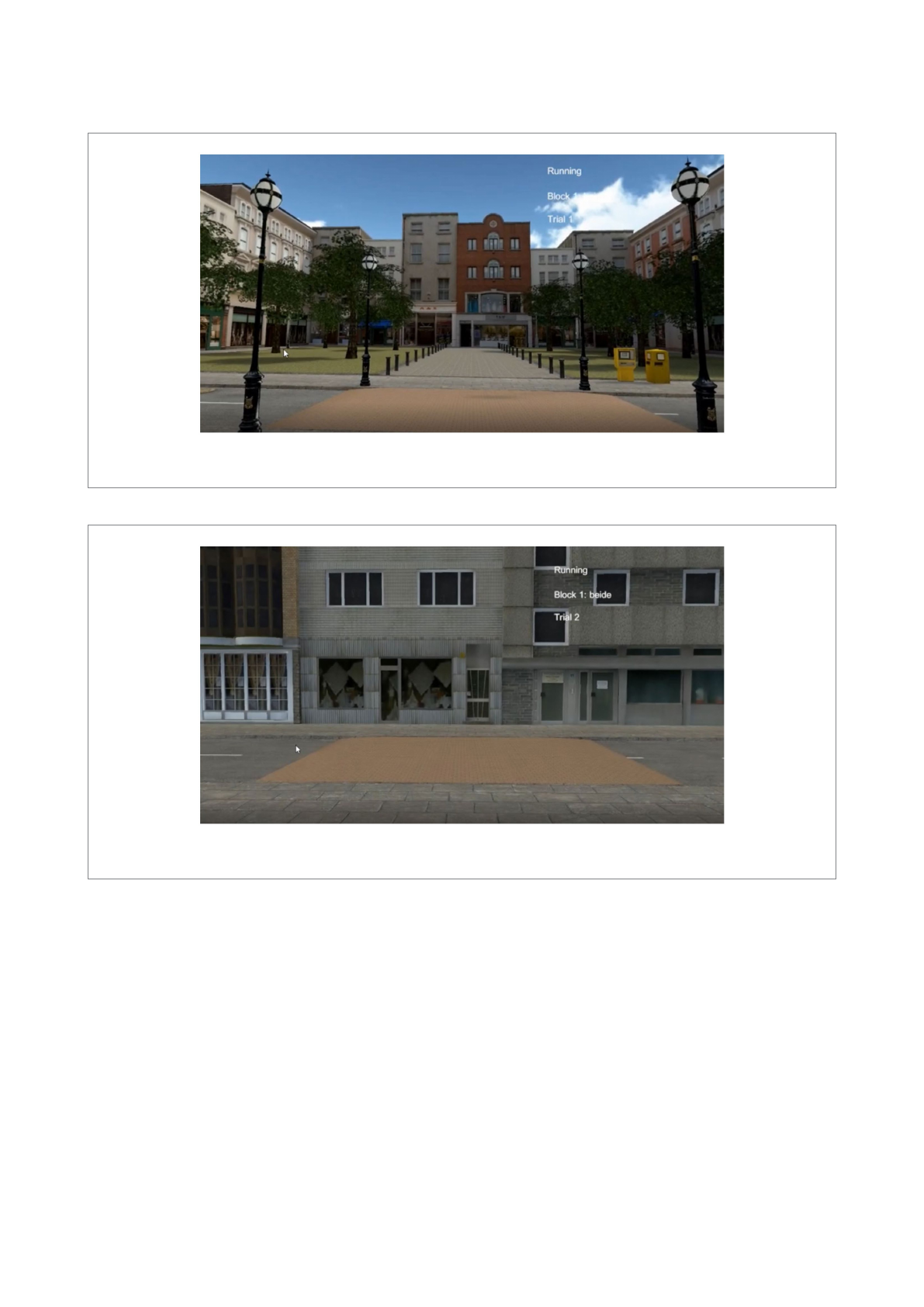
developed for the experiment. Both showed urban environments.
Pictures of each scene are presented in Figures2, 3. For reasons of
safety and logistics, it was decided not to use a height difference
between the street and the footpath. Instead, the crossing consisted
of a so-called “drop kerb,” which in Germany is often realized by
raising the street instead of lowering the kerbstone. That allowed
participants to walk on even ground through the whole scene,
with a consistent view in the VR.
The whole walking distance inside the VR environment was
10 m, of which 7 m were in the street scene and 1.5 m to turn
around at each end. Participants started 3.5 m before the curb
stone. Vibration feedback was triggered when the subject was
2.25 m away from the kerbstone. This distance was chosen for
practical reasons to assure enough time to check for cars. When
entering the street, participants walked 3.5 m until the scene
stopped automatically (0.5 m before the end of the virtual street).
In half of the scenes, cars were crossing. They crossed before
and/or after the vibration feedback. Cars drove with a velocity of
28 km per hour. Cars appeared in a pseudorandom order. The time
the cars started was varied to make prediction impossible for
participants. Cars were triggered by the distance of the subject to
the street. This distance varied between 5.5 m, 4 m, and 3 m before
the vibration feedback, and 2 m, 1.5 m, and 1 m after the vibration
feedback was given. The blocks consisted of 18 trials each, with
nine trails containing cars. As it was a double lane road, cars could
come from both directions. The number of cars from the left and
right was counterbalanced.
FIGURE1
A participant wearing the HTC VIVE and using the walking frame during the VR experiment.
Wiczorek and Protzak 10.3389/fpsyg.2022.966096
Frontiers in Psychology 04 frontiersin.org
When a new scene started, participants could decide when to
start walking. When participants arrived at the other side of the
road (i.e., 0.5 m before the end of the road), the scene ended,
participants went into a grey room, where they received text-based
information in addition to a symbol that indicated to turn around.
They were then instructed to place their feet at a marked position
on the floor. When they were in the right spot, the next scene
started. The two different street environments were alternating.
The subject’s body was represented by either a male or female
avatar to improve immersion (Slater, 2009). The representation of
the walking frame, followed the hybrid prototyping approach
(Exner etal., 2016). It was physically present and touched by the
subjects, as well as also equipped with a tracker and visually
represented in the VR.
The original assistance system that detects the kerbstone was
simulated in the VR experiment. Thus, unlike the real system the
one used in the VR experiment was 100% reliable.
Procedure
At arrival, participants filled in the consent form and read the
instructions. Afterwards, they conducted the MoCA (Montreal
Cognitive Assessment, Nasreddine et al., 2005), an acuity test
(Landolt ring chart), and a test regarding contrast sensitivity (Pelli-
Robson chart), before answering a simulator sickness
questionnaire. Then, participants read the VR instruction, and
trackers were put on the hands, feet, and belly. The avatar was
calibrated to the person’s height. When everything was prepared,
participants had a 10- to 20-min training phase to familiarize
FIGURE2
Street scene 1 of the VR experiment.
FIGURE3
Street scene 2 of the VR experiment.
Wiczorek and Protzak 10.3389/fpsyg.2022.966096
Frontiers in Psychology 05 frontiersin.org
themselves with the VR environment. Before and after the training
phase, they answered the SSQ (Simulator Sickness Questionnaire,
Kennedy et al., 1993). Afterwards, the assistance system was
introduced and its functions were demonstrated. Participants were
instructed to cross the streets as normally as possible, i.e., to take
safe decisions, but not to beunnaturally cautious. They were
informed that the assistance system was there to support road
crossing. However, they did not receive any instruction on how to
behave as a response to the vibration signal. It was not mentioned
that the system should support stopping and checking for traffic.
The actual experiment consisted of two blocks with 18 trials each.
Both blocks contained nine trials with cars and nine trials without.
The walking frame was used during the entire experiment for
safety reasons, but one block was conducted with the assistance
system switched on, and the other one with the system switched
off. The order of blocks was counterbalanced. After each block,
participants filled in the NASA TLX (NASA Task Load Index, Hart
and Staveland, 1988). When the experimental blocks were over,
they answered the acceptance questionnaire. Finally, participants
received financial compensation and were thanked for
their participation.
Dependent measures
Objective dependent measures were stopping (both feet on
the floor with a max. length of 5 cm between feet, for a min. time
of 2 s) frequency per block and head rotation frequency (straight,
medium left, medium right, complete left, and complete right).
Every orientation was defined as a window of 36° in the rotation
field of 180° in front of the participant. NASA TLX served as a
measure for subjective workload. Acceptance was assessed via the
three questions that are listed in Table1.
Results
Stopping frequency and workload were analyzed with 2 × 2
ANOVAs with repeated measures. Head rotation frequency was
analyzed with a 2 × 2 × 5 ANOVA. Significance level alpha was set
to 0.05. Values between 0.05 and 0.1 are classified as marginally
significant. Acceptance was analyzed descriptively. Assumptions
of sphericity were tested using the Mauchly test. In case of
violation, Greenhouse–Geisser corrected values are reported.
Stopping frequency
Stopping frequencies were analyzed using the sum of all stops
for the respective number of trials (i.e., 18 trials with/without cars,
and 18 trials with/without an assistance system). The main effect
for cars revealed significance with a large effect size, F(1, 22) = 9.27;
p = 0.006; η2p = 0.3. When cars were crossing, participants stopped
with a higher frequency (M = 2.72 SD = 3.82) than without cars
(M = 1.09; SD = 2.67), but the standard deviation was higher with
cars than without. Analysis of the main effect of the assistance
system revealed only a marginally significant result but had a large
effect size, F(1, 22) = 3.53; p = 0.07; η2p = 0.14. Participants stopped
more often with the assistance system (M = 2.2, SD = 3.38) than
without it (M = 1.63, SD = 3.1), and the standard deviation was
similar for both conditions. The interaction effect did not reveal
significance. Results are presented in Figure4.
Head rotation frequency
Head rotation frequencies were analyzed for the five
orientations within single trials. The main effect of cars was
significant and based on a large effect size, F(1, 22) = 7.68; p = 0.01;
η2p = 0.26. Participants moved their heads more frequently when
cars were passing (sum of all orientations: M = 8.0, SD = 6.1) than
without cars (sum of all orientations: M = 6.4, SD = 4.16), but the
standard deviation was higher with cars. The main effect of the
assistance system revealed significance and the effect size was large,
F(1, 22) = 5.72; p = 0.03; η2p = 0.21. The frequency of head movement
was higher with the assistance system (sum of all orientations:
M = 7.92, SD = 5.14) than without the system (sum of all orientations:
M = 6.51, SD = 5.07), and the standard deviation was similar for both
conditions. Results are presented in Figure5. The main effect for
orientation was also significant with a very large effect size, F(1.76,
38.81) = 44.78; p < 0.001; η2p = 0.67. The highest frequency was found
for the straight head orientation (M = 2.12, SD = 1.16), followed by
the medium right (M = 1.62, SD = 1.17) and the medium left
orientation (M = 1.67, SD = 1.38), and the lowest frequencies were
found for complete right (M = 0.91, SD = 0.66) and complete left
orientations (M = 0.89, SD = 0.74). The interaction between the
assistance system and orientation was marginally significant, with a
medium effect size F(2.39,52.52) = 2.82; p = 0.06; η
2p
= 0.11. The other
interactions were not significant. Results are presented in Figure6.
Workload
The overall workload did not differ significantly. It was
perceived as low (on a scale of 0–100) in both conditions, with the
TABLE1 Frequencies and percentages of answers to the three
acceptance questions regarding the assistance system in the VR
study.
Questions Answers
The
assistance
system
increases
traffic safety
Totally
disagree
Rather
disagree
Indifferent Rather
agree
Totally
agree
1 4.3% 2 8.7% 4 17.4% 9 23.1% 7 30.4%
A lot of
people would
like the
assistance
system
Totally
disagree
Rather
disagree
Indifferent Rather
agree
Totally
agree
0 0% 5 21.7% 5 21.7% 11 47.8% 2 8.7%
Would
youbuy such
a system?
Most
unlikely
Rather
unlikely
Indifferent Rather
likely
Most
likely
4 17.4% 2 8.7% 10 43.5% 3 13% 4 17.4%
Loading more pages...