
A Fractional Time-Derivative Model for
Severe Wear: Hypothesis and
Implications
Ivan Argatov*
Institut für Mechanik, Technische Universität Berlin, Berlin, Germany
Based on the example of wear of polymers, which exhibit a power-law time variation of the
wear loss under constant loading conditions, a fractional time-derivative wear equation has
been introduced. The wear contact problem with a fixed contact zone is solved using the
known method of separation of spatial and time variables. It is shown that during the wear
process, the contact pressure approaches a uniform distribution over the contact area,
which is termed as a quasi-steady-state solution, since the mean volumetric wear rate
does not tend to become constant. It is of interest that the contact pressure variation
displays a decaying oscillatory nature in the case of severe wear, when the mean
volumetric wear rate increases with time.
Keywords: severe wear, fractional time derivative, wearing-in, quasi-steady state, wear equation
1 INTRODUCTION
Wear is a tribological phenomenon that accompanies contact interaction of solids with interfacial
sliding between their surfaces and manifests itself primarily in gradual loss of material due to the
subsurface damage accumulation and surface degradation (Zmitrowicz, 2006). In wear material
testing, the wear loss is usually measured in terms of the volume of lost material, V, which yields the
wear depth, w, by relating to the area of contact, A,as
wV
A.(1)
Eq. 1 tentatively assumes that the wear loss is the same at each point of the contact zone, and this
condition is characteristic of the steady-state wear process (Dundurs and Comninou, 1980;Páczelt
and Mróz, 2007).
Usually, sliding wear tests are performed under constant normal loading conditions, which are
characterized by either contact load, P, or mean contact pressure,
pP
A.(2)
In the cases of mild or moderate wear, after some initial running-in (Wright and Kukureka, 2001;
Khonsari et al., 2021) or wearing-in (Blau, 2005) period of time, the condition of steady state
p(x, t)≡
pis realized at the contact interface and maintained for a long time period, during which
the wear material characteristics have been measured.
In the steady-state wear process, the linear wear rate, defined as the time derivative _
wdw/dt,is
constant in time, and moreover, the contact pressure pachieves a constant value over the entire
contact zone. So, in the steady-state wear regime, the volumetric wear loss Vwill be a linear function
of the time variable t, and thus, the linear wear rate can be evaluated as
Edited by:
Yu Tian,
Tsinghua University, China
Reviewed by:
Emanuel Willert,
Technical University of Berlin,
Germany
Feodor M Borodich,
Cardiff University, United Kingdom
*Correspondence:
Ivan Argatov
[email protected]erlin.de
Specialty section:
This article was submitted to
Tribology,
a section of the journal
Frontiers in Mechanical Engineering
Received: 26 March 2022
Accepted: 08 April 2022
Published: 27 April 2022
Citation:
Argatov I (2022) A Fractional Time-
Derivative Model for Severe Wear:
Hypothesis and Implications.
Front. Mech. Eng 8:905026.
doi: 10.3389/fmech.2022.905026
Frontiers in Mechanical Engineering | www.frontiersin.org April 2022 | Volume 8 | Article 9050261
ORIGINAL RESEARCH
published: 27 April 2022
doi: 10.3389/fmech.2022.905026
_
wVt
2
()
−Vt
1
()
At
2−t1
()
,(3)
where t
1
and t
2
are any two different moments of time taken
during the steady-state period.
In many cases, the wear equation can be written in the
following form (Kragelsky, 1965):
VkwPvt.(4)
Here, vis the sliding velocity, and k
w
is the wear coefficient. In
view of Eqs 1,2,Eq. 4 can be represented as
_
wkw
pv, (5)
which is known as Archard’s equation (Meng and Ludema, 1995),
though similar wear equations were introduced earlier by Reye
(1860),Khrushchov and Babichev (1941), and Holm (1946). The
wear coefficient k
w
is determined during the steady-state
conditions by using Eqs 3,5.
A generalization of the wear Eq. 4, which was suggested by
Rhee (1970) for polymer-bonded friction materials, takes the
form
VKwPγvβtα,(6)
where K
w
is the wear factor, and α,β,γare parameters. However,
while Eq. 6 has been successfully used to predict the wear
resistance of polymer composite materials designed for
extreme environmental conditions (Gardos, 1982;Sedakova
and Kozyrev, 2021), there is a problem with applying the wear
Eq. 6 for solving the wear contact problems with the spatial-
temporal variation of the contact pressures (Grzelczyk and
Awrejcewicz, 2015;Ciavarella et al., 2020).
In recent years, there has been a growing interest in modeling
severe wear (Nguyen et al., 2018;Popov and Pohrt, 2018;Li et al.,
2020). In a broad sense, severe wear is defined as a form of wear
characterized by a rapid increase in the amount and size of wear
particles (Blau, 1992). In many situations, the regime of severe
wear can be characterized by the absence of any steady-state
regime under constant conditions. This is so, for example, in wear
of polymers (Viswanath and Bellow, 1995), when under constant
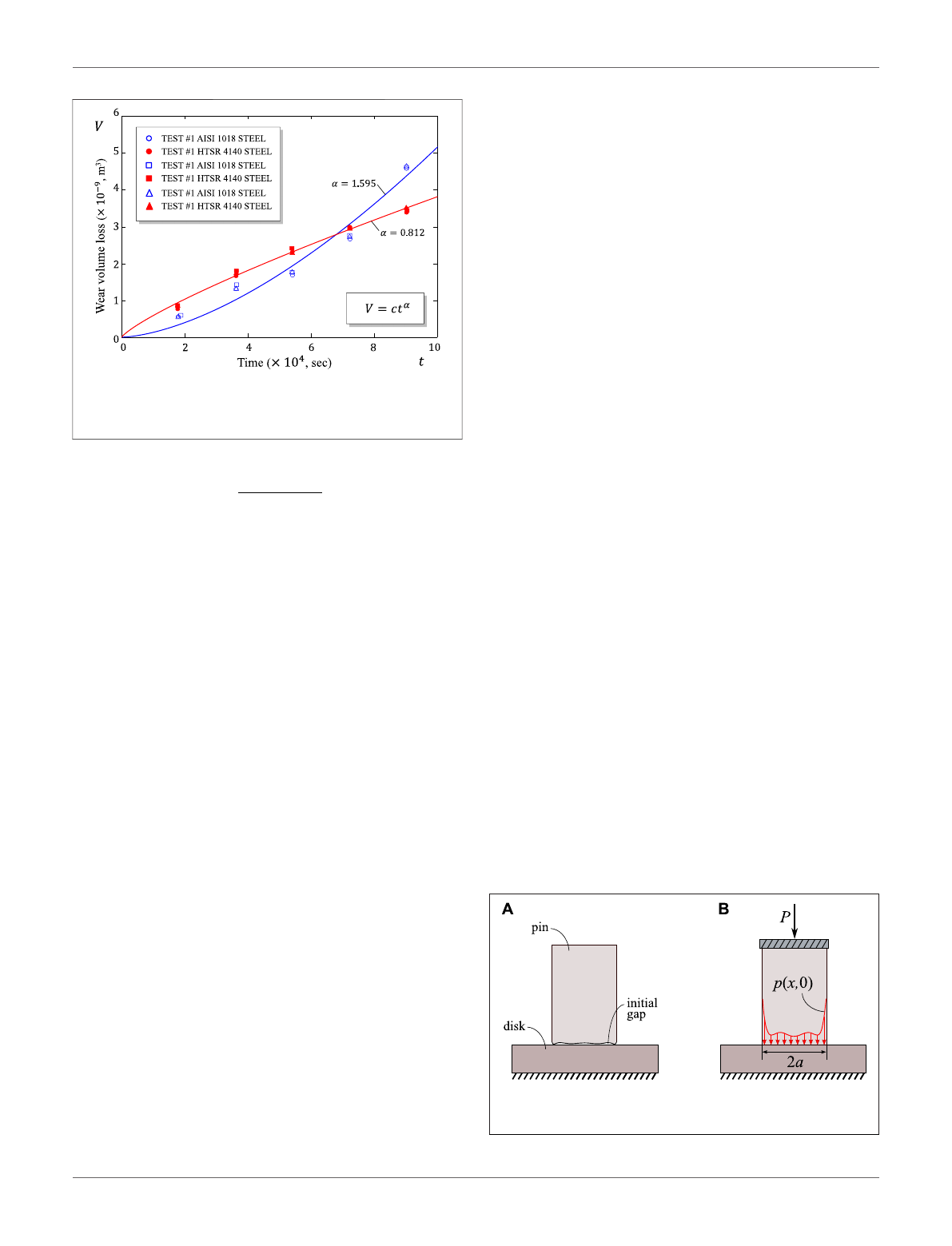
normal load and sliding speed (see Figure 1), the wear volume
loss Vvaries proportionally to some power of time, that is t
α
, and
therefore, the wear rate _
wwill be a function of time (proportional
to t
α−1
) during the entire testing period.
It is clear that in experiments like that, whose results are shown
in Figure 1,Eq. 3 is not applicable. Instead we can consider the
ratio V(t)/tthat defines the mean volumetric wear rate. The two
cases α= 0.812 and α= 1.595 differ by the decreasing/increasing
trend of this quantity. The wear process with increasing in time
mean volumetric wear rate (that is when α>1) will be termed as
severe wear in a narrow sense. At the same time, the case α<1
may called mild wear, as the wear rate decreases towards zero
during the wear process.
Further, when comparing the Archard Eq. 4 with the Rhee Eq.
6, we see that for polymers the Archard wear coefficient k
w
, which
is evaluated as the ratio V/Pvt, is found to depend on time, that is
kw~tα−1. This means that for polymer-bonded friction
materials, for which the Rhee wear equation applies, the
concept of wear coefficient as a constant characteristic of
tribo-pair is not applicable. However, the two cases α<1 and
α>1 drastically differ in the time variation of the linear wear rate.
In what follows, to avoid misinterpretations of mild and severe
wear regimes, these two cases will be termed as the sub-Archard
and super-Archard regimes of wear.
However, a natural concern arises about the effect of the
wearing-in period, when the initial contact pressure evolves
due to the contact geometry adaptation (Argatov I and Chai,
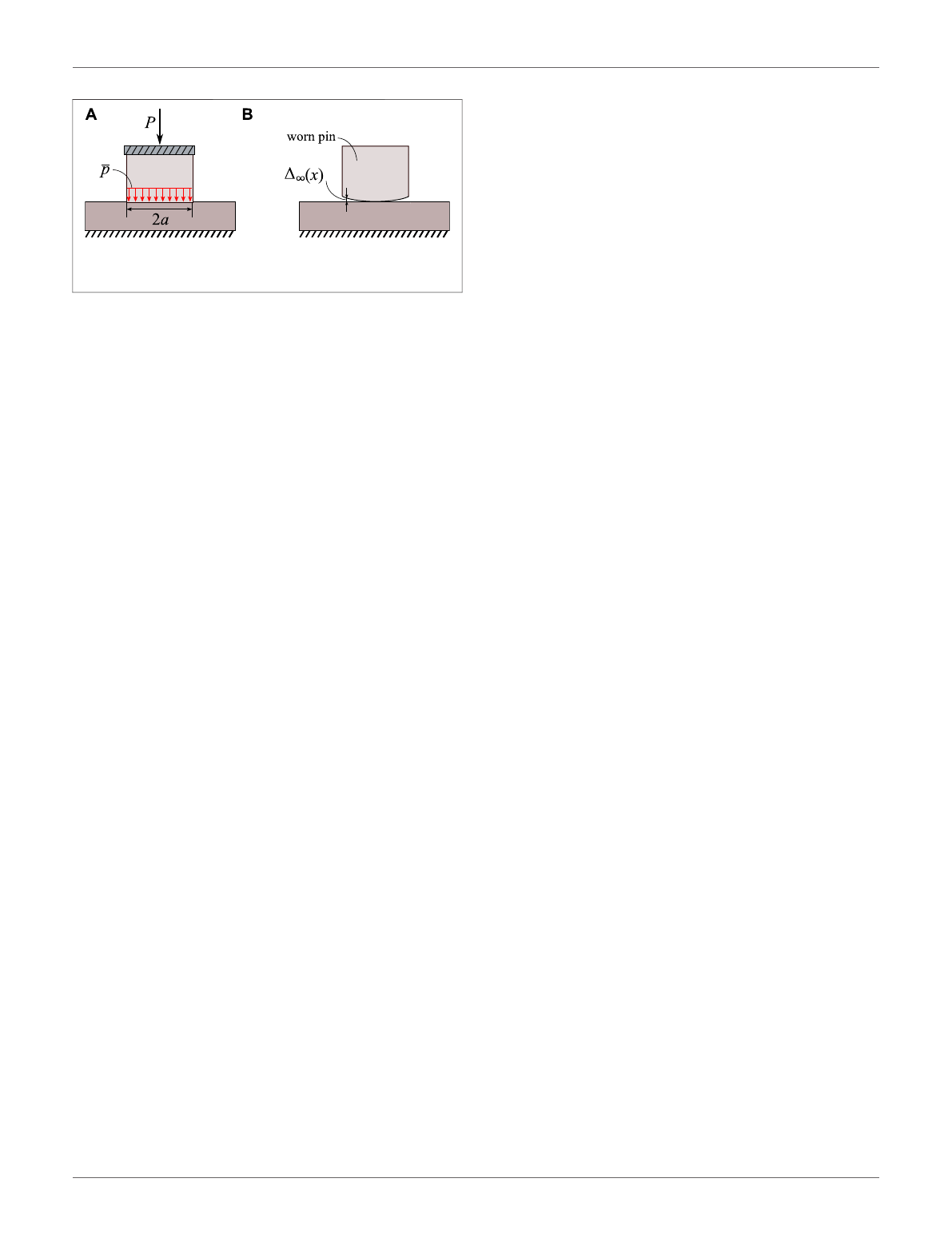
2020). In a pin-on-disk sliding wear tests, when a wearable pin is
put on an abrasive disk, there exists a small initial gap between the
surfaces brought into contact (see Figure 2A), which influences
the initial contact pressure, p(x,t)att= 0, in the loaded state (see
Figure 2B).
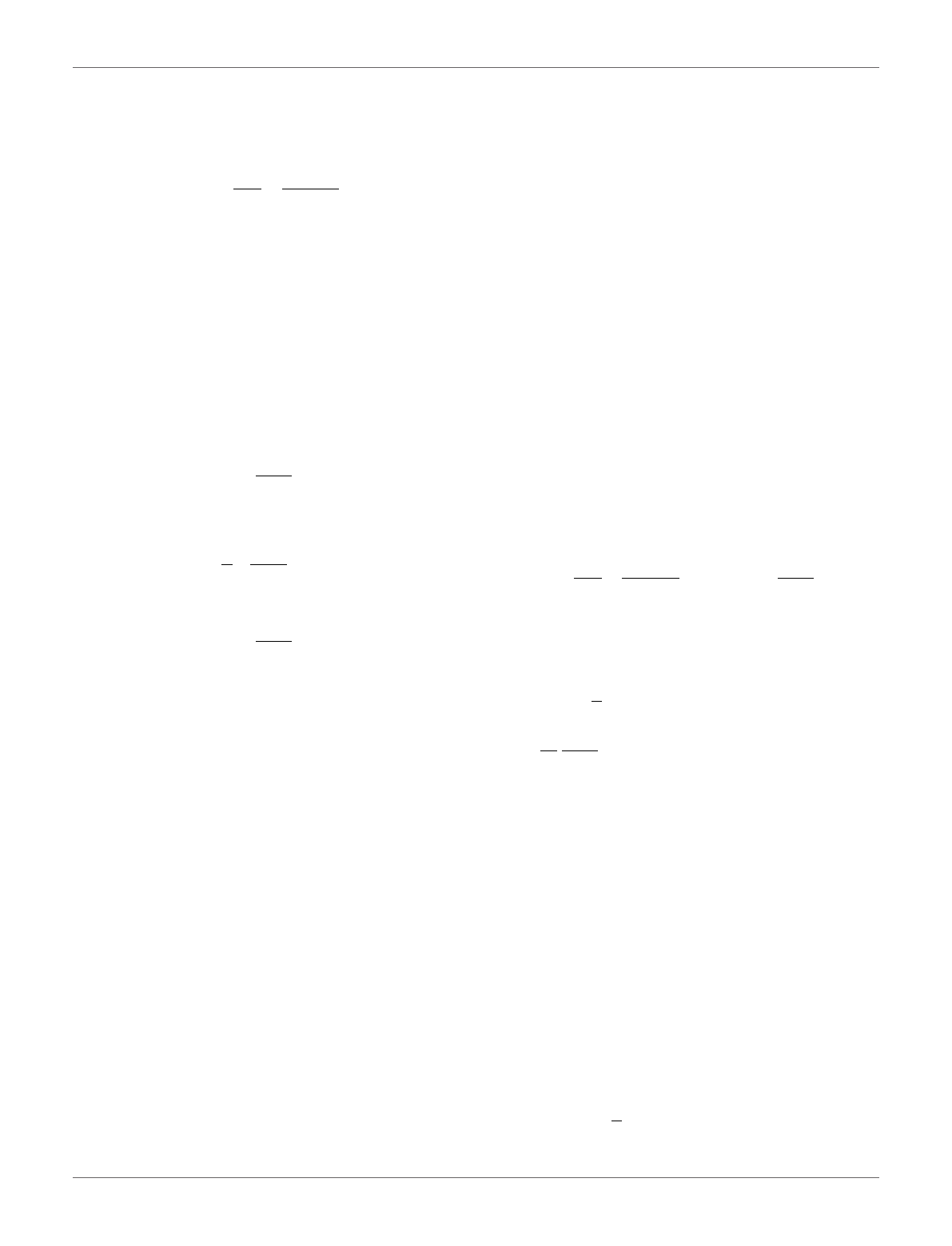
During the wear process, because of the contact geometry
adaptation, the contact pressure p(x,t) evolves in time and
approaches a steady-state pattern of uniform distribution over
the contact zone (see Figure 3A). The corresponding steady-state
shape of the pin surface facing the disk is characterized by the
limiting gap function, Δ
∞
(x), which does not depend on the initial
gap (see Figure 3B).
FIGURE 1 | Volume loss vs. time on linear coordinates with best fit
power-law lines for Delrin against two counterparts (based on the
experimental data taken obtained by Viswanath and Bellow (1995)).
FIGURE 2 | Initial contact configuration: (A) Unloaded state; (B)
Loaded state.
Frontiers in Mechanical Engineering | www.frontiersin.org April 2022 | Volume 8 | Article 9050262
Argatov A Fractional Time-Derivative Model
When the theoretical modeling framework of the contact
geometry adaptation (Figures 2,3) is applied to the case of
super-Archard wear, the main problem to solve in this way is a
generalization of the experimentally observed non-stationary
relation between _
wand
pconst for the practically important
case p≠const. To date there are no publications on
generalizations of the Rhee model (6) similar to the Archard
wear equation, which follows from Eq. 5 by replacing the mean
contact pressure
pwith the contact pressure p. It should be
stressed that the same approach does not work for the Rhee wear
Eq. 6. To this extent, the concept of fractional time-derivative can
be efficiently applied to gain insight into the contact pressure
evolution in severe wear.
In recent years, the apparatus of fractional differentiation
has been used in mechanics, in particular, to generalize models
of diffusion (Mainardi, 1996), rough contact (Argatov, 2003),
and viscoelasticity (Su et al., 2021). In the present study, we use
the classical Riemann–Liouville derivative. It should be noted
that a number of different approaches exist to introduce a
more general notion of the derivative (Ortigueira and
Machado, 2015). In particular, a so-called fractal fractional
derivative (Chen et al., 2010;He, 2011) does not involve the
integral convolution and represents a local operator. However,
whereas fractals have emerged as a useful mathematical tool in
tribological research (Ling, 1990;Borodich and Onishchenko,
1993;Borodich, 1999), the present study pioneers the use of
concept of the fractional derivative in modeling wear
processes.
Since the theory of wear contact problem is well established
(Aleksandrov and Kovalenko, 1980;Kovalenko, 1985), we adopt
the approach suggested in the constructive review (Argatov I and
Chai Y. S, 2020) and take a general point of view on the
description of the pin/disk contact interaction, which is
applicable both in the three- and two-dimensional settings. To
illustrate the contact pressure evolution, we consider a two-
dimensional wear contact problem (Galin, 1976), for which a
detailed analysis has been available in the literature (Aleksandrov
et al., 1978;Argatov and Fadin, 2011). It is anticipated that with
certain modifications the fractional time-derivative approach
developed below can be applied to model other temporary-
spatial severe damage processes like mechanochemical
corrosion (Sedova and Pronina, 2022), wear/scratch damage
(Dasari et al., 2009), and wear of metamaterials (Garland
et al., 2020).
The rest of the paper is organized as follows. In Section 2,we
introduce a fractional time-derivative(FTD)wearequationasa
straightforward generalization of the Archard wear equation by
replacing the time derivative in the definition of the linear wear
rate with appropriate fractional derivative. The FTD wear
equation when applied under constant load conditions
predicts a power-law time variation for the volumetric wear
similar to the Rhee wear equation. This observation explains the
main goal of the present study and that is to generalize the Rhee
wear equation to the case of non-constant (spatial-temporal)
variations of the contact pressure. It is hypothesized that the
FTD wear equation provides such a generalization. The main
body of the paper is devoted to the analysis of implications
drawn from the solution of the model wear contact problem
formulated in Section 3. In particular, the existence of a quasi-
steady state is identified in Section 4 and, using the method of
variables separation (Section 5), the evaluation of the contact
pressure towards the quasi-steady state is considered in detail in
Section 6.Aparticularlynovelaspect—oscillatory nature—of
the contact pressure variations is discussed in Section 7.The
spatial-temporal variation of the worn profile is presented in
Section 8.Finally,inSection 9, we discuss the obtained results
and further generalizations and formulate the conclusions.
2 FRACTIONAL TIME-DERIVATIVE WEAR
EQUATION
In its basic version due to Archard (1953), the wear equation
linearly relates the wear rate at a point with coordinate xand at
time tto the contact pressure as
_
wx,t
()
κpx,t
() (7)
with some constant κ, which is related to the wear coefficient, k
w
,
as κ=k
w
v, where vis the speed of relative sliding at the contact
interface.
Under the assumption that the worn material is absent at the
initial moment t= 0 , that is w(x,0)=0,Eq. 7 is equivalent to the
relation
wx,t
()
κ
t
0
px,τ
()
dτ.(8)
The integral form Eq. 8 of the wear Eq. 7 is used in
formulating the wear contact problems (Galin, 1976;Argatov
and Tato, 2012), as the wear depth w(x,t) directly describes the
evolution of the contact geometry in the direction normal to the
contact interface.
Let us replace the differentiation with respect to time on the
left-hand side of Eq. 7 with a more general notion of the
derivative. In particular, we make use of the fractional
Riemann–Liouville derivative of order α, which will be
denoted by Dα
t. In this way, we straightforwardly arrive at the
equation
Dα
twx,t
()
κpx,t
()
,(9)
FIGURE 3 | Steady-state contact configuration: (A) Loaded state; (B)
Unloaded state.
Frontiers in Mechanical Engineering | www.frontiersin.org April 2022 | Volume 8 | Article 9050263
Argatov A Fractional Time-Derivative Model
which contains two parameters, namely, κand α.
In the framework of fractional calculus, from Eq. 9, it follows
that
wx,t
()
κ
Γα
()
t
0
px,τ
()
t−τ
()
1−αdτ,(10)
where Γ(x) is the gamma function.
The right-hand side of Eq. 10 contains the Riemann–Liouville
integral of order αwhich is consistent with the inversion of the
respective fractional derivative appearing in Eq. 9.
It is to emphasize that by taking α=1inEq. 10, in view of the
normalization condition Γ(1) = 1, we recover the integral form
Eq. 8 of the non-fractional Archard wear equation. Therefore, it
makes sense to assume that 0 <α<2, since Eq. 9 generalizes
Archard’sEq. 7, which exactly corresponds to the basic case α=1.
Remark 1. Observe that in the case of steady state, when
p(x, t)≡
p,Eq. 10 yields
wκ
p
αΓα
()
tα,(11)
and thus, the mean linear wear rate (evaluated from the very onset
of the wear process) will be non-constant
w
tκ
p
αΓα
()
tα−1.
In view of Eq. 1, from Eq. 11, it follows that
VκP
αΓα
()
tα. (12)
Eq. 12 can be fitted to the experimental data shown in Figure 1
to uniquely determine both parameters κand α.
3 WEAR CONTACT PROBLEM
FORMULATION
Following Komogortsev (1985) and Argatov and Fadin (2011),
we consider a wear contact problem for an elastic solid (pin) in
contact with a rigid base (disk) with a fixed zone of contact, x∈ω,
under a constant normal load, P. In this case, the resultant of the
contact pressure p(x,t) satisfies the equilibrium equation
ω
px,t
()
dxP, t ≥0. (13)
The wear contact problem can be reduced to the following
governing integral equation in the domain x∈ω,t≥0, which
involves two unknowns, namely, the contact pressure p(x,t) and
the contact displacement δ
0
(t):
ω
Kx,ξ
()
pξ,t
()
dξδ0t
()−Δ0x
()
+wx,t
()[]
. (14)
Here, K(x,ξ) is a given surface-influence function (with xand ξ
being the points of observation and integration), Δ
0
(x) is a known
function of initial gap between the contacting surfaces, and w(x,t)
is the wear depth which is related to the contact pressure p(x,t)by
Eq. 10. It is to note that the gap function is usually subject to the
centering condition Δ
0
(0) = 0.
We recall that the surface-influence function K(x,ξ)isdefined
as the normal component of the corresponding vector Green’s
function restricted to the surface of the elastic solid, and thus, the
equilibrium equations inside the elastic solid (Shillor et al., 2004)
are naturally satisfied by the construction of the function K(x,ξ).
The reduction of the wear contact problem to the corresponding
governing integral equation is well known (Argatov I and Chai Y.
S, 2020) and allows applying the boundary element method
(Sfantos and Aliabadi, 2006) for the direct evaluation of the
contact pressures.
4 UNIFORM CONTACT PRESSURE AS A
QUASI-STEADY STATE
By integrating Eq. 10 over the contact interval and taking into
account the equilibrium Eq. 13, we derive the following the
relations for the volumetric wear loss:
Vt
()
ω
wx,t
()
dx
κ
Γα
()
t
0
dτ
t−τ
()
1−α
ω
px,τ
()
dxκPtα
αΓα
()
.
(15)
Thus, making use of Eq. 15 and following the previously
introduced method (Komogortsev, 1985), we can reduce the
governing integral Eq. 14 to the equation
ω
Kx,ξ
()
−1
AK1ξ
()
pξ,t
()
−pξ,0
()
dξ+wx,t
()
κP
A
tα
αΓα
()
,(16)
where x∈ωand t>0. Moreover, Adenotes the measure of the
contact area defined as
A
ω
dx, (17)
and we have introduced the notation
K1ξ
()
ω
Kx,ξ
()
dx. (18)
The form of Eq. 16 is preferable in wear contact problems
(Komogortsev, 1985), as the effect of the initial contact
configuration, which is associated with the gap function Δ
0
(x), is
now incorporated into the initial contact pressure density p(x,0).
Now, let us introduce the notation for the mean contact
pressure and the point-wise deviation of the contact pressure
from its mean value
pP
A, q x, t
()
px,t
()
−
p. (19)
Frontiers in Mechanical Engineering | www.frontiersin.org April 2022 | Volume 8 | Article 9050264
Argatov A Fractional Time-Derivative Model

Thus, in view of (Eqs 15,19), Eq. 16 can be rewritten in the
form
ω
K2x, ξ
()
qξ,t
()
−qξ,0
()
dξ+κ
Γα
()
t
0
qx,τ
()
t−τ
()
1−αdτ0,
(20)
where x∈ωand t>0, and we have introduced the notation
K2x, ξ
()
Kx,ξ
()
−1
AK1ξ
()
−1
AK1x
()
. (21)
We note that in regard to the kernel of the integral Eq. 16, the
third term on the right-hand side of Eq. 21 has been introduced
for symmetrization (Argatov and Chai, 2019). This is convenient
but does not affect the result because of the zero-mean property
ω
qξ,t
()
dξ0,t≥0,(22)
which follows from the definition (19)
2
of the function q(x,t) and
the equation of equilibrium Eq. 13.
To this end, the behavior of the residual function q(x,t) as time
progresses is shown to be described by Eq. 20. By analogy with the
wear contact problems based on the Archard wear equation, it
can be anticipated that the deviation of the contact pressure from
its mean value diminishes with time. In the case under
consideration, we also find that q(x,t)→0ast→∞, and
hence the mean contact pressure
pwill be termed as a quasi-
steady-state solution.
5 NON-DIMENSIONALIZATION AND
SEPARATION OF VARIABLES
For the sake of simplicity, we assume that the pin material is
isotropic and can be characterized by Young’s modulus, E, and
Poisson’s ratio, ]. In contact mechanics, an important role is
played by the reduced elastic modulus E*=E/(1 −]
2
). Also, let a
denote a characteristic size of the contact domain ω, which can be
taken to be equal to the half-diameter of ω.
Following Komogortsev (1985), we take advantage of the fact
that Eq. 20, in view of Eq. 10, is in a separable form (the kernel
function K
2
(x,ξ) does not depend on the time variable t) that
makes it possible to construct its solution in the form
qx,t
()
∞
n1
bnt
()
ϕnx
()
,(23)
where ϕ
n
(x) is the nth eigenfunction of the integral operator with
the kernel K
2
(x,ξ) given by Eq. 21, i.e.,
E*
a
ω
K2x, ξ
()
ϕnξ
()
dξλnϕnx
()
,x∈ω. (24)
We note that the non-dimensionalising factor E*/ahas been
introduced on the left-hand side of Eq. 24 to ensure that the
eigenvalues λ
1
,λ
2
,... are dimensionless. It is pertinent to note
here that, in view of Eqs 21,22, the eigenfunctions possess the
zero-mean property
ω
ϕnξ
()
dξ0n1,2,...
()
. (25)
Without loss of generality, we assume that the solutions of the
eigenvalue problem Eq. 24 are normalized as
1
A
ω
ϕnξ
()
2dξ1n1,2,...
()
. (26)
Thus, taking into account relations (19)
2
and Eq. 23, we can
represent the contact pressure in the form
px,t
()
p+
∞
n1
bnt
()
ϕnx
()
,(27)
where
pis given by (19)
1
, and the set of coordinate functions
ϕ
n
(x) is uniquely defined by Eqs 24,26).
By setting t= 0, from Eq. 27, it follows that
px,0
()
p+
∞
n1
bn0
()
ϕnx
()
,(28)
where p(x, 0) solves the integral equation of initial contact, which
is obtained from Eq. 14 by setting t= 0, whereas, in view of Eq. 26,
the coefficients of the infinite sum are given by
bn0
()
1
A
ω
px,0
()
−
p
ϕnx
()
dx. (29)
In the next section, we consider the evolution of the functions
b
n
(t), which satisfy the initial conditions (29). The corresponding
equation is simply obtained by substituting the expansion (Eq.
23) into Eq. 20 and utilizing Eq. 24.
6 EVOLUTION OF THE CONTACT
PRESSURE TOWARDS THE
QUASI-STEADY STATE
In view of Eq. 24, the series solution Eq. 23 satisfies Eq. 20, if and
only if
bnt
()+E*κ
λnaΓα
()
t
0
bnτ
()
t−τ
()
1−αdτbn0
()
. (30)
Equation 30 is classified as Abel’s integral equation of the
second kind (see, e.g., (Gorenflo and Mainardi, 1997;Gorenflo
et al., 2014)), and its solution b
n
(t) is given in the form
bnt
()bn0
()
Eα−E*κ
λnatα
(31)
in terms of the single-parameter Mittag-Leffler function of order
α,defined as
Eαx
()
∞
k0
xk
Γαk+1
()
,(32)
Frontiers in Mechanical Engineering | www.frontiersin.org April 2022 | Volume 8 | Article 9050265
Argatov A Fractional Time-Derivative Model
Loading more pages...