IEEE VEHICULAR TECHNOLOGY SOCIETY SECTION
Received January 31, 2022, accepted March 9, 2022, date of publication April 14, 2022, date of current version April 28, 2022.
Digital Object Identifier 10.1109/ACCESS.2022.3167424
A Numerical Study on Constant Spacing
Policies for Starting Platoons at
Oversaturated Intersections
KAY MASSOW 1, ILJA RADUSCH2, AND ROBERT SHORTEN 3, (Senior Member, IEEE)
1Daimler Center for Automotive Information Technology Innovations, Technische Universität Berlin, 10587 Berlin, Germany
2Fraunhofer Institute for Open Communication Systems (FOKUS), 10589 Berlin, Germany
3Dyson School of Design Engineering, Imperial College London, London SW7 2AZ, U.K.
ABSTRACT Cooperative Adaptive Cruise Control (CACC) is considered as a key potential enabler to
improve driving safety and traffic efficiency. It allows for automated vehicle following using wireless
communication in addition to onboard sensors. To achieve string stability in CACC platoons, constant time
gap (CTG) spacing policies have prevailed in research; namely, vehicle interspacing grows with the speed.
While constant distance gap (CDG) spacing policies provide superior potential to increase traffic capacity
than CTG, their major drawbacks are a smaller safety margin at high velocities and that string stability cannot
be achieved using a one-vehicle look-ahead communication. In this work, we propose to apply CDG only in
a few driving situations, when traffic throughput is of highest importance and safety requirements can be met
due to relatively low velocities. As the most relevant situations where CDG could be applied, we identify
starting platoons at signalized intersections. With this application scenario we show that applying CDG only
in a few specific and crucial situation can have a major impact on traffic efficiency. Specifically, we compare
CTG with CDG regarding its potential to increase the capacity of traffic lights. Starting with the elementary
situation of single traffic lights we expand our scope to whole traffic networks including several thousand
vehicles in simulation. Using real world data to calibrate and validate vehicle dynamics simulation and traffic
simulation, the study discusses the most relevant working parameters of CDG, CTG, and the traffic system
in which both are applied.
INDEX TERMS Cooperative adaptive cruise control, constant spacing, traffic light, signalized intersection,
vehicle simulation, traffic simulation, capacity, throughput.
I. INTRODUCTION
CACC is the extension of Adaptive Cruise Control (ACC),
a driver assistance system which automatically adjusts the
speed of a road vehicle to maintain a safe distance from
vehicles ahead [1]. Today’s ACC systems use radar sen-
sors to measure this distance. CACC extends ACC by addi-
tional communication components to exchange information
with preceding vehicles. This information exchange helps to
increase the density of platoons of vehicles with activated
ACC and to potentially tackle string instabilities occurring in
such platoons. String instability in vehicle platoons is caused
by radar sensor delays and the dynamics of the vehicles
and their power trains. To facilitate string stable spacing
policies, the constant time gap (CTG) has prevailed in
The associate editor coordinating the review of this manuscript and
approving it for publication was Jie Gao .
research; namely, the target distance between vehicles grows
with the speed. However, increasing distances entails effi-
ciency loss. This fact is reflected by the recent decision of
Daimler to cancel their truck platooning program, which
aimed on a 0.68 seconds time gap (15 m at 80 Km/h [40])
and did not achieve the expected efficiency in terms of fuel
saving as stated in [2].
In this work, a constant distance gap (CDG) policy for
CACC is considered. Although CDG can improve traffic
throughput enormously, its applicability in urban environ-
ments has been proven to be very limited, due to its demand
on communication structures to achieve robust string sta-
bility [3]. This demand includes communication with more
vehicles than the direct preceding vehicle. Additionally,
CDG only makes sense in combination with very small gaps,
which implies potential safety issues at increasing velocities.
The hypothesis of this work is to apply CDG only in few
43766 This work is licensed under a Creative Commons Attribution 4.0 License. For more information, see https://creativecommons.org/licenses/by/4.0/ VOLUME 10, 2022

K. Massow et al.: Numerical Study on Constant Spacing Policies for Starting Platoons at Oversaturated Intersections
driving situations, when the following circumstances occur
at the same time:
•Traffic throughput is of crucial importance.
•Platoon sizes are short enough that string instability or
communication topology complexity can be handled,
e.g., employing mini-platoon control strategy [3].
•Velocities are low enough to cover safety requirements,
acceleration is smooth and predictable.
In all other situations, there either is limited benefit in
applying CDG or it entails too much difficulties, so that
CTG should be applied. While there are several use cases in
which such conditions prevail, clearly, traffic-light-controlled
intersections are one of the most relevant. At intersections,
the traffic flow of two crossing streets share one spot in a
time-duplex manner. Thus, exhibiting the highest possible
traffic density on this spot is of high importance. Intersections
controlled by traffic lights in addition provide clearly regu-
lated right-of-way, i.e., during a green light phase, a platoon
can pass this spot as a whole without paying attention to the
cross traffic. Moreover, starting up from a stop line when
the traffic light changes to green results in a smooth and
predictable acceleration maneuver. Thus, as the most relevant
application scenario for the hypothesis of this work presented
above, we will focus on starting platoons at oversaturated,
traffic-light-controlled intersections subsequently. Further
application scenarios will be investigated in future work.
By oversaturated we mean the traffic demand is higher
than the intersection capacity, i.e., its maximum traffic
throughput [26], a situation commonly found in major cities.
Accordingly, we shall assume urban speeds of up to 50 km/h
and stable platoons on intersection either achieved by lim-
ited length or a capable communication topology [3]. The
research questions discussed in the rest of this paper focus
on capacity improvement of CDG over CTG at oversatu-
rated, signalized intersections. Our model for car following
dynamics is based on the controller design presented in [30],
parameterized using real world data.
Remark: Before proceeding, some comments on string sta-
bility are in order. Although string stability is a very important
aspect for realizing CDG in platoons (see related work in the
next section), we do not address string stability nor related
control theory in this work. Instead, we focus on assessing
the traffic performance of CDG over other spacing policies.
While there are many other publications dealing with string
stability, the rationale for this work is the usefulness of pla-
toons, string stability permitting, in the context of specific
use-cases. Our objective here is to study one such situation
in detail, and to illustrate the effectiveness of platoons in an
elementary situation in which string stability is not likely to
be a serious technical issue.
A. MAIN FINDINGS OF THIS WORK AND THE STRUCTURE
OF THIS PAPER
The contribution of this work is to show the benefit of
applying CDG at starting platoons at oversaturated, signal-
ized intersections. Assessing related benefits and potential
drawbacks requires a comprehensive and thorough consid-
eration of the whole traffic system. This includes many
microscopic and macroscopic aspects and aggregating par-
tial results. From the authors’ perspective, these should be
presented as a whole and not be split apart in different
papers. With this in mind, after discussing related work in the
Section II, the remainder of the paper is structured as follows.
•In Section III, we define the scope of our research and
assess the CDG capacity improvement at a single traffic
light on a straight road. For this purpose, we parameter-
ize a CDG policy for vehicle simulation using real world
data. CDG shows a traffic throughput improvement over
the CTG baseline of up to 140%.
•In Section IV, we extend our study to a whole intersec-
tion, in order to cover traffic related aspects which lower
the traffic throughput, such as turning vehicles and right-
of-way. Vehicle simulations, including 160 vehicles,
showed that these aspects can lower the CDG throughput
improvement down to 27% in worst case. We further
found that CDG benefit on throughput grows superlin-
early with the CDG penetration rate among vehicles.
•In Section V, we present a method to calibrate a traffic
simulation model using vehicle dynamics simulation.
This is a prerequisite to include consideration of vehi-
cle dynamics in a traffic simulation with thousands of
vehicles to simulate CDG in a whole traffic system.
•In Section VI we study the impact of CDG on mutually
influencing intersections of a traffic system. A synthetic
arterial scenario of five intersections revealed that CDG
may create backlogs of adjacent intersections, which
block the cross traffic. A synthetic grid scenario of
25 intersections revealed that CDG is vulnerable to cre-
ate gridlocks. We show the impact of these effects on
traffic throughput and how they are related to the traffic
light configurations with respect to green light times and
offset.
•In Section VII, we complement our findings with study-
ing CDG in a real world road network simulation sce-
nario including ten intersections in Berlin, Germany.
CDG gains a throughput improvement of 70%, while
a penetration of 50% CDG reached an improvement
of 25%. To exhibit its full potential in urban traffic,
CDG needs to incorporate cooperative behavior between
vehicles in order to enable cutting in and to prevent
junction blocking.
We conclude this paper in Section VIII. In order to help
the reader to follow the main findings arising throughout the
study, each section concludes with a discussion of its main
findings.
II. RELATED WORK
The most relevant goals for the design of CACC systems are
to create small gaps between vehicles to increase road capac-
ity, guarantee string stability [5], while keeping the commu-
nication topology as simple as possible [1]. The latter is,
in the best case, reduced to each vehicle in a platoon receiving
VOLUME 10, 2022 43767

K. Massow et al.: Numerical Study on Constant Spacing Policies for Starting Platoons at Oversaturated Intersections
data from its direct preceding vehicle. Further possible com-
munication structures may include receiving data from the
platoon leader, multiple predecessors, the successor, or from
a fully networked platoon [25]. Each of these structures entail
different advantages regarding control quality, string stability
and, thus, on the minimum gap size. Further goals on control
optimization are ride comfort and fuel/energy consumption,
which are both dependent from acceleration profiles.
A. CONSTANT TIME GAP POLICY (CTG)
The constant time gap policy refers to maintaining a time
gap between vehicles in a platoon, which means that the gap
increases linearly with the velocity. This policy has received
most attention in the literature as it is known to improve
string stability even with the simplest communication
structure [5], [6]. The policy alsocontributes to safety, driving
comfort, and imitates human driver behavior. However, the
downside of velocity dependent gaps is the platoon length
growing linearly with the velocity and the associated required
road space. Commonly suggested time gaps of 0.6 s [7]
correspond relates to additional road space of 8 m at 50km/h
compared to stand still.
B. CONSTANT DISTANCE GAP POLICY (CDG)
The constant distance gap policy refers to a fixed gap between
vehicles, independent from the velocity. This policy achieves
the maximum efficiency in terms of road capacity improve-
ment [50]; however string stability cannot be achieved using
the information of the preceding vehicle only. In [8] it was
shown that including additional information from the platoon
leader is required. In order to address string stability, further
communication topologies like mini-platoons [3] or multiple
vehicles look ahead are reviewed in [3] [49]. Cyclic as well
as bidirectional communication architectures are discussed
in [9]. These approaches require a formal platoon architecture
in order to determine a leader and the order of vehicles in a
platoon [1]. This is more difficult to achieve than a simple
communication with the preceding vehicle, which seems to
make it unattractive to employ CDG rather than CTG, even
with the drawback in terms of efficiency. With our hypothesis
in mind, to employ CDG in very specific situations only, for
this work, we can summarize the most relevant information
on the state of the art regarding CDG as follows. After very
early work [8], [50] on CDG showed that overall string stable
platoons cannot be established using a one-vehicle look-
ahead communication, CDG received less subsequent atten-
tion in literature than CTG. Most works on CDG focused on
achieving string stability for the employment of CDG at the
full range of driving conditions [3], [5], [9], [45], [49], [50].
Since this goal is out of scope of this work, we omit a deeper
literature review in this field. However, the interested reader
is referred to the survey article [45] and [1], [49].
C. ADAPTIVE GAP POLICIES
In contrast to CTG, many more parameters than a constant
time factor can be incorporated in the spacing strategy, such
as the spacing strategy proposed in this work. In the follow-
ing, we give an overview of different approaches of such a
kind, summarized under the term adaptive gap policies. The
hypothesis of this work is to apply CDG only in few driving
situations, realized by a context aware switch between CTG
and CDG. This switch is depending on the current importance
of traffic throughput, platoon length, and velocity. To our best
knowledge, switching between CDG and CTG as we propose
in this work, nor solely at a certain velocity threshold, has
not been presented in literature before. In fact, this switching
is not exactly an adaptive gap policy but rather an exchange
of the policy online. In contrary, most works in literature
either aim on designing one variable time gap (VTG) policy
for the full range of driving conditions or switch between
different longitudinal controllers while targeting the same
spacing strategy. Switching between longitudinal controllers,
mostly refers to different controller parameterization, e.g.,
regarding the information flow topology [43], or safety mea-
sures [44], triggered by ambient traffic conditions or com-
munication impairments. The desired inter-vehicle spacing
of VTG policies, in contrast to CTG, is treated as a func-
tion that has more parameters than a constant multiplier of
velocity. There are different approaches that either combine
the benefits of CDG and CTG in one VTG policy in different
ways, or further include different control goals by making
the gap dependent from more parameters than velocity [45],
e.g., to address traffic safety, stability, and efficiency [47].
The latter is mainly addressed by reducing the gap compared
with CTG while keep it smaller in general, but enlarge it
at higher absolute [48] and relative velocities [46]. Further
work has been done to improve the traffic flow stability in
comparison to CTG [10], to integrate safety aspects in the
spacing, such as the constant-safety-factor criterion (CSF)
[1], [47], and vehicle limitations [11], or to adapt it to human
behavior [12]. These adaptive policies gain their positive
effect mostly at shorter distances at lower speeds compared
to CTG. More detailed information about different types of
VTG and other spacing policies can be found in the survey
article [45] and [47].
D. COOPERATIVE MANEUVERS REGARDING
CROSS/PARALLEL TRAFFIC
Another important aspect regarding the spacing of CACC
platoons, is related to cooperative maneuvering [13]. Since
platoons need to allow for cut-in maneuvers of other vehicles,
required gaps have to be provided on demand. For urban
applications, cooperation is especially required at intersec-
tions when platoons need to be crossed by other vehicles.
We do not go into further detail on the wide field of related
applications and the performance of different concepts among
them, since cooperative maneuvering is not the focus of this
work. However, although this work does not deal with such
cooperative coordination strategy explicitly, the subsequent
sections reveal that under certain conditions, CDG should
be complemented by them. Such applications [14] which
extend CACC to accommodate cross traffic and parallel
43768 VOLUME 10, 2022

K. Massow et al.: Numerical Study on Constant Spacing Policies for Starting Platoons at Oversaturated Intersections
traffic are currently being researched, as an example the
interested reader can refer to the German research project,
IMAGinE [36]. Its applications ‘‘cooperative lane merging’’
and ‘‘cooperative decentralized intersection’’ enable cutting-
in maneuvers and ensure clearing intersections for cross traf-
fic, which is relevant for this paper.
E. COOPERATIVE START-UP AT TRAFFIC LIGHTS
In the field of combining CACC with traffic-light control,
most research is aimed at synchronization of platoons and
green lights phases, so that stop and go can be prevented,
such as [15]. Very few works focus on start-up control coordi-
nating vehicles and traffic lights, so that as many vehicles as
possible can pass an intersection after stand still. [16] studies
platoons of vehicles waiting in front of a traffic-light regu-
lated intersection, using SUMO [34]. A coordinated start-up
initiated by a V2X message SPAT (SAE 2735) of the traffic
light is proposed and the underlying algorithm also addresses
the problem of low market penetrations. [17] considers a
cooperative start-up of real world platoons at traffic lights.
Findings indicate that a constant and preferably small gap is
essential for increasing the throughput at traffic light regu-
lated intersections. [18] presents an automatic start-up control
to start up vehicles with less delay (47.2%) to improve traffic
throughput, while [19] addresses an optimized acceleration
profile to reduce fuel consumption.
F. PLATOONS IN SIGNALIZED NETWORKS
One important aspect of our study is the impact of CDG on
mutually influencing intersections in a traffic system. In order
to assess the impact of CACC on whole traffic systems, it is
not sufficient to consider isolated intersections. In fact, multi-
ple mutually influencing intersections such as signalized arte-
rials need to be considered. This becomes especially relevant
for dense platoons of vehicles, as shown in the subsequent
sections.
Most research in this field focus on the control of traf-
fic lights. In [20] and [51], the authors present algorithms
to optimize signals at arterials, based on real-time platoon
information. Different penetration rates are evaluated on
an eight-intersection arterial using the VISSIM simulator,
achieving a throughput improvement around 10% at 100%
penetration in [20]. A travel time improvement of 70% on an
arterial in a 4 ×4 grid network was achieved in [51] using
SUMO [34].
While this shows the potential of including platoon infor-
mation in the control strategies of traffic lights, in our study
we focus on the benefits of optimizing platoon interspac-
ing, rather than the signal control. Related work like [15]
addresses optimization from the perspective of the vehicles
in a cooperative way. Clusters of vehicles are formed that
approach and depart at intersections on signalized arteri-
als. The approach [15] requires a penetration rate of 100%
and showed an increased traffic throughput of 50%, while
reducing energy consumption. In [24], the authors showed,
by means of a 16-intersection arterial, that without changing
the signal control, throughput can be doubled if vehicles are
organized to cross the intersections in platoons with 0.75 s
headway, i.e., by reducing human delay and time gap only.
Other works, such as [21] and [22] aim to prevent platoon
stops by slowing down until the queue waiting at the inter-
section starts moving in order to safe energy/fuel. Penetration
rates lower than 100% are considered in [21]. In [23] splitting
up platoons and predicting trajectories aim on ideally passing
green light phases. However, this requires a certain space
while approaching the intersection and may hardly work for
arterials with small intersection interspaces.
The trend of studies on platoons in signalized networks
show that the most influencing factor regarding traffic
throughput improvement is the fact that vehicles cross the
intersections in platoons. Further, smaller enhancements can
be generated by signal aware platoon control [15], [21],
[22], [24] and a coordinated control strategy of the traffic
lights [20], [51], which entails considerable system complex-
ity in proportion to the achieved benefit. In this work we will
show that simply applying CDG in platoons in oversaturated
conditions can further increase the throughput by a similar
order of magnitude as platooning itself. However, we will
also give indications how CDG platooning in oversaturated
grid networks could be aligned with the signal schema.
III. SINGLE TRAFFIC LIGHT PERFORMANCE
In this section we investigate the performance of CDG on
a single traffic light, before considering whole intersections
and traffic systems in the subsequent sections. For this pur-
pose, we first need to define a baseline for comparison with
other spacing policies and how performance can be measured.
In this regard, we define the research scope of this
work, including preliminary assumptions. From this scope,
we derive the working parameters for all policies; e.g., the
standstill distance, as these parameters have a major influence
on system performance. Once these parameters are identified,
we use real world data to calibrate them. Finally, we describe
the implementation of the policies that we use for simulation
with the PHABMACS simulator [13] and we evaluate the
results.
A. RESEARCH SCOPE
The most relevant metric to assess traffic light performance
is capacity, which is defined by its maximum throughput,
i.e., the maximum possible number of vehicles passing per
time unit [26]. In order to measure the capacity, we consider
traffic-lights in an oversaturated condition only (e.g., during
rush-hour), which implies that there are always more vehicles
waiting in the queue than can pass in one green phase.
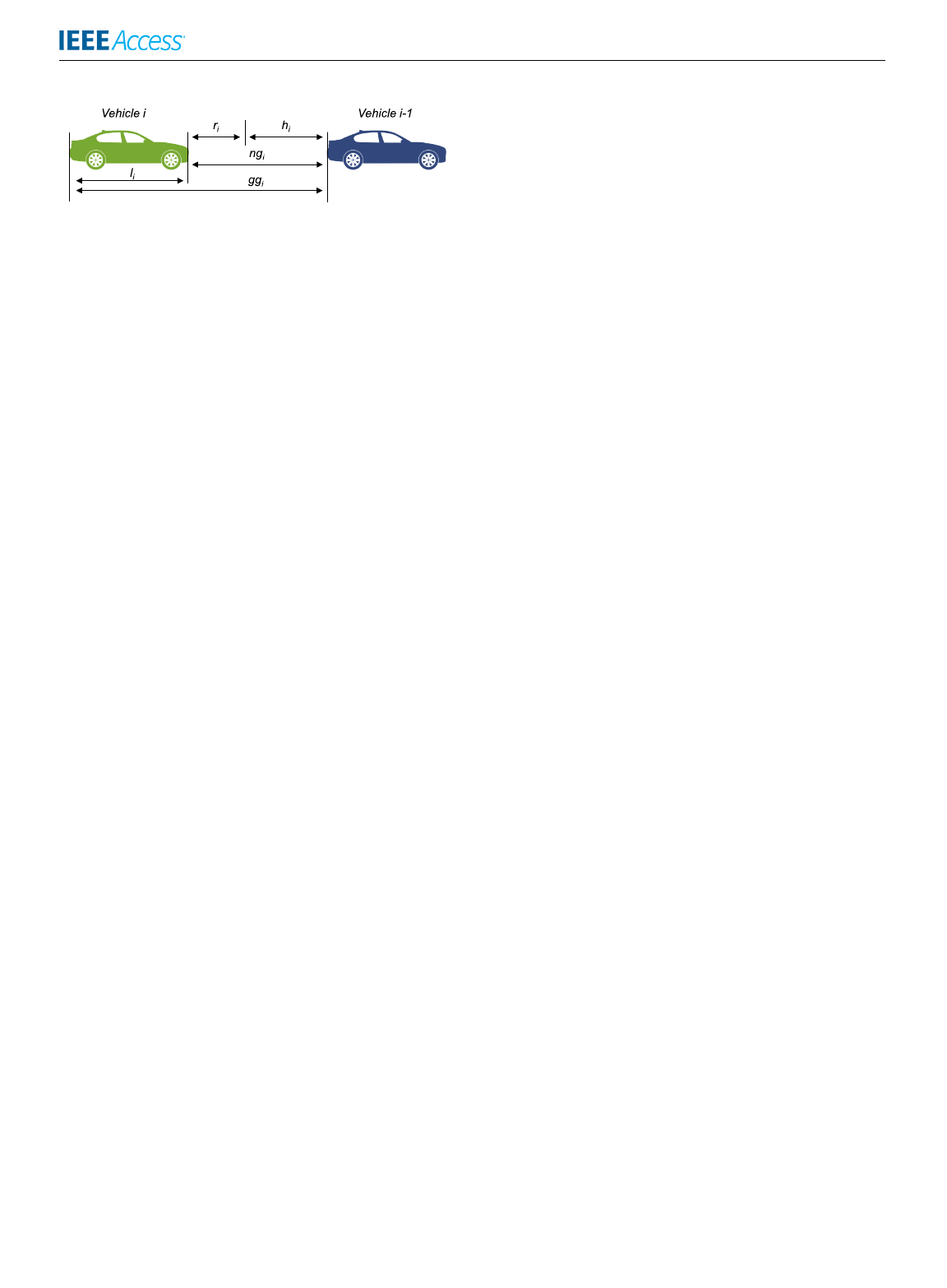
The relevant relationship between throughput and platoons
passing the traffic-light is the number of vehicles per platoon
length. The portion of the platoon length pertaining to each
vehicle in a CTG platoon is dependent upon the parameters
depicted in Fig. 1. The constant portion is the vehicle length
plus the standstill distance. The dynamic portion is the time
gap, which grows with the platoon velocity. The dynamic
VOLUME 10, 2022 43769
K. Massow et al.: Numerical Study on Constant Spacing Policies for Starting Platoons at Oversaturated Intersections
FIGURE 1. A platoon of i vehicles, where liis the length, riis the
standstill distance, hiis the time gap, ngiis the net gap, and ggiis the
gross gap of the ith vehicle in the platoon.
part is zero in CDG platoons, i.e., the CDG platoon length
is always the same like in standstill, which makes the CDG
so effective.
Another relevant parameter, especially for the start-up at
traffic lights, is the drivers’ reaction time. This time refers
to the delayed start-up of a vehicle in the platoon with
regard to the start-up of its preceding vehicle. In contrast to
CTG, which is similar to human drivers’ vehicle following
behavior, CDG can hardly be realized by humans. Thus,
for CDG we assume a fully automated longitudinal control
with no driver in the loop. This consideration is especially
relevant for the start-up at traffic lights, as human reaction
time would make notable difference here. Since the objective
is to compare the following behavior of CDG with other
policies, we neglect the reaction time for all policies in this
work.
Accordingly, in order to compare CDG with CTG, we need
to parametrize the constant portion, vehicle length and the
standstill distance with the same values. Furthermore, these
values should be chosen as realistic as possible for com-
parison, as their ratio to the time gap makes a considerable
difference. Finally, we also need to parameterize the time gap
of CTG as realistically as possible.
Indications for all these parameters could be derived
from Highway Capacity Manual (HCM) [26] and the
German equivalent HBS [27]. The HCM indicates a capac-
ity of 2400 vehicles per hour on open roadways, while the
HBS indicates 2000 vehicles per hour. Besides the fact that
both values differ considerably (gross gap between vehicles
of 1.8 s and 1.5 s) we have no indication on how to split
that time in the dynamic and the constant portion. Recent
work [14], on the other hand, indicates that time gaps for CTG
of below 0.6 s can be realized for string stable platoons with
automated CACC, (0.25 s in [41]).
Remark: In this study we do not use the theoretical param-
eters used in the above reports, but rather real measurements.
We assumed for this study, that future CACC distance behav-
ior in series production will be of similar performance as
skilled human drivers and with no reaction time. For this
purpose, we derive our baseline (time gap and standstill
distance) from real world data collected during the field trial
simTD [28]. For the sake of fairness, in this section, we will
also present results of using parameterization of achieved
time gaps in current research. We further assume that the
velocities in our study are low enough so that an automated
system can keep the CDG standstill distance.
The resulting parametrization is presented in the next sub-
section. Recall, the hypothesis of this work is to apply CDG
only in few driving situations, realized by a context aware
switch between CTG and CDG. This switch is dependent
from the current importance of traffic throughput, platoon
length, and speed. With the focus on starting platoons at
traffic-light-controlled intersections, we consider this context
to be always given at all simulations presented in this work
because:
•Traffic throughput is of crucial importance at intersec-
tions as they are the bottlenecks in traffic.
•The platoon length is inevitably limited due to the signal
phases cutting platoons.
•Most traffic light scenarios are located in urban areas and
we limit our study to velocities below 50 Km/h.
As earlier mentioned, CDG should not be applied at arbi-
trary high velocities due to safety aspects and stability issues
arising when the one-vehicle-look-ahead communicationpat-
tern is applied. Thus, there is a speed limit at which the CDG
spacing policy is required to be switched to CTG. For the
threshold of this speed limit we chose 50 Km/h and 30 Km/h
as parameters to be studied in simulation, due to the fol-
lowing considerations. While in German cities 50 Km/h is
the speed limit for general safety considerations, 30 km/h
is the speed limit for areas of increased safety demand.
These values provide a good indication for different lev-
els of velocity related safety in our study. Thus, we define
and study two different Policies. For the 50 Km/h thresh-
old we can apply CDG without switching in simulation of
urban environments. In addition, we define another policy
that switches from CDG to CTG at 30 Km/h. This policy
will be referred to as SWITCH in the remainder of this
work.
The specific velocity thresholds of future real world appli-
cation should be derived from real world working parameters,
e.g., the achieved performance of the underlying longitudinal
controller and the current reliability of communication link.
The same applies for the optimal standstill distance in real
world, which should be chosen as small as possible in order
to gain efficiency and large enough regarding the named real
world parameters. Note that, keeping a standstill distance
of 2.95 m, as we will use in our study, might seem challenging
in terms of user experience, even below 30 Km/h. However,
we assume that with the advent of automated driving, users
will gain trust in that technology in the future. This also
applies for CTG with very small time gaps, as [41] shows
in simulation with a resulting distance of 3.25 m at 30 Km/h
and 3.75 m at 50 Km/h.
As earlier stated, this study considers the one-vehicle-look-
ahead communication pattern only, which does not require
a formal platoon architecture and provides the best pos-
sible communication stability for high frequent real time
applications like CACC. We assume this pattern to be the
most suitable in oversaturated multi-intersection-scenarios
with a high proportion of V2X enabled vehicles. However,
in cases where one-vehicle-look-ahead communication can
43770 VOLUME 10, 2022
Loading more pages...