FACTA UNIVERSITATIS
Series: Mechanical Engineering Vol. 15, No 2, 2017, pp. 295 - 306
DOI: 10.22190/FUME170503007D
© 2017 by University of Niš, Serbia | Creative Commons Licence: CC BY-NC-ND
Original scientific paper
SIMULATION OF FRICTIONAL DISSIPATION
UNDER BIAXIAL TANGENTIAL LOADING
WITH THE METHOD OF DIMENSIONALITY REDUCTION
UDC 531.4
Andrey V. Dimaki1, Roman Pohrt2, Valentin L. Popov2,3,4
1Institute of Strength Physics and Materials Science SB RAS, Tomsk, Russia
2Berlin University of Technology, Germany
3National Research Tomsk Polytechnic University, Russia
4National research Tomsk State University, Russia
Abstract. The paper is concerned with the contact between the elastic bodies subjected
to a constant normal load and a varying tangential loading in two directions of the
contact plane. For uni-axial in-plane loading, the Cattaneo-Mindlin superposition principle
can be applied even if the normal load is not constant but varies as well. However, this is
generally not the case if the contact is periodically loaded in two perpendicular in-plane
directions. The applicability of the Cattaneo-Mindlin superposition principle guarantees the
applicability of the method of dimensionality reduction (MDR) which in the case of a uni-
axial in-plane loading has the same accuracy as the Cattaneo-Mindlin theory. In the
present paper we investigate whether it is possible to generalize the procedure used in the
MDR for bi-axial in-plane loading. By comparison of the MDR-results with a complete
three-dimensional numeric solution, we arrive at the conclusion that the exact mapping is
not possible. However, the inaccuracy of the MDR solution is on the same order of
magnitude as the inaccuracy of the Cattaneo-Mindlin theory itself. This means that the
MDR can be also used as a good approximation for bi-axial in-plane loading.
Key Words: Friction, Dissipation, Tangential Contact, Biaxial In-plane Loading,
Circular Loading, Cattaneo, Mindlin, MDR
1. INTRODUCTION
Friction is a dissipative process transforming mechanical energy into heat and material
changes of the contacting partners. The energy dissipation may be connected with material
dissipation (wear) [1] or utilized for structural damping [2]. Studying both wear and
Received May 03, 2017 / Accepted June 20, 2017
Corresponding author: Andrey V. Dimaki
Institute of Strength Physics and Materials Science SB RAS, Akademicheskii av. 2/4, 634055 Tomsk, Russia
E-mail: dav@ispms.tsc.ru

296 A.V. DIMAKI, R. POHRT, V.L. POPOV
damping requires the solution of a tangential contact problem. The simplest case of a
tangential loading is an increasing uni-axial tangential loading at a constant normal force.
This problem has been solved first by Cattaneo [3] and later independently by Mindlin [4].
They have shown that a tangential stress distribution can be represented as a superposition
of two solutions for the normal contact problem of the same geometry, only multiplied with
the coefficient of friction. This reduction to the normal contact problem is exactly the
feature which allows the application of the method of dimensionality reduction (MDR) [5],
(see also Chapter 5 devoted to tangential contact in [6]). However, Cattaneo and Mindlin
have not noticed a small inconsistency in their solution. In their theory, it is assumed that
the frictional stresses in the slip domain are all directed in the direction of the applied
tangential force. With the exception of the unrealistic case where both the contacting
materials have Poisson ratio zero, this assumption violates the condition that at every
position in the slip domain, the slip is directed in the direction opposing the tangential
stresses. The reason for this is the presence of an additional slip motion perpendicular to the
direction of the applied force. This was first pointed out by Johnson [7] who showed that
the maximum inclination of slip angle is on the order of magnitude ν/(4-ν) which is equal to
0.09 for ν=1/3 and 0.14 for ν=1/2. He concluded that the error is not large and that the
Cattaneo-Mindlin solution is a good approximation. Later comparisons with numerical
solutions have shown that the above mentioned inconsistency may have an important
influence on the distribution of wear but has almost no impact on the macroscopic force-
displacement relations [8]. A detailed analysis can be found also in [9].
In the present paper we consider a more complicated problem of bi-axial oscillating
loading (superimposed loading in two in-plane directions). The aim of the paper is twofold:
on one hand, we are interested in a better understanding of the energy dissipation in bi-
axially loaded contacts; on the other hand, we would like to check the applicability of the
dimensionality reduction method to this class of problems. At present, there are only a few
numerical studies providing the dependencies of dissipated friction energy on the
parameters of loading [10]. The applicability of the MDR would provide a simple tool for
simulating arbitrary loading histories with applications in the dynamics of structures with
frictional contacts.
2. ENERGY DISSIPATION IN A SINGLE-POINT CONTACT FOR CIRCULAR MOVEMENT
Let us start by considering a single isotropic linearly elastic massless element which
can deform in normal direction as well as in two tangential directions. We will call this
element a “spring”. The spring should have out-of-plane stiffness kz and isotropic in-
plane stiffness kx=ky. It is first pressed against a rigid half-plane with a normal force Fz
and then moved in the direction of the x-axis. We will assume that at the immediate
contact point between the spring and the substrate, there is friction characterized by a
constant coefficient of friction μ. When the free end of the spring is moved horizontally,
it first deforms elastically until the in-plane displacement achieves the critical value
0/
zx
l F k
. (1)
After this, the lower contact point starts sliding and the force remains constant.
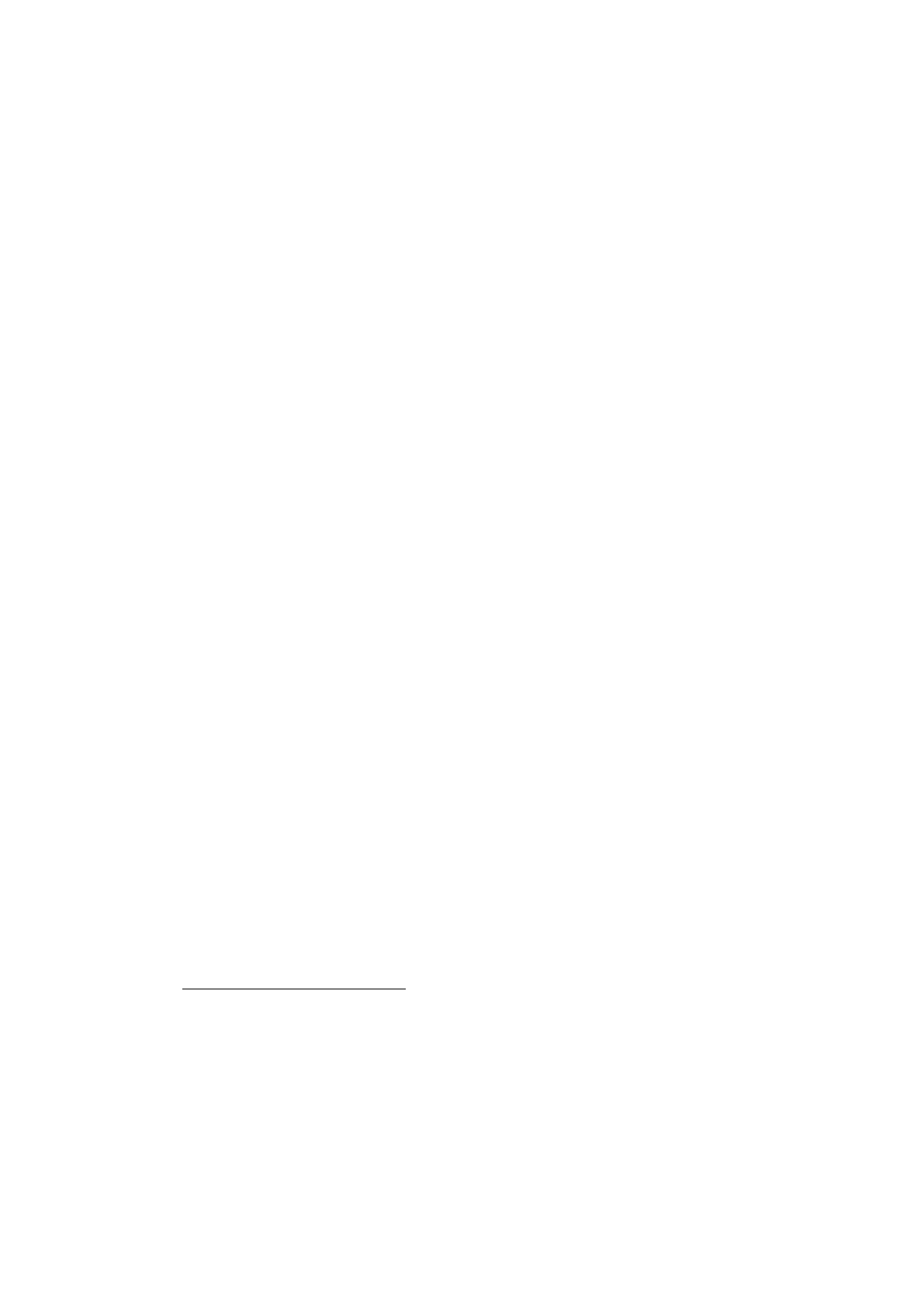
If the spring is moved on a circle with radius R<l0, then it remains in the stick state at
any time. However, if the radius of movement exceeds critical value, R≥l0, the contact
Simulation of Frictional Dissipation under Biaxial Tangential Loading... 297
point will slip. In the stationary state, it will move in a circle with a smaller radius rc,
while the in-plane displacement of the spring remains constant and equal to l0. The
frictional force is assumed to be opposite to the elastic force and at the same time it has to
be directed opposite to the velocity vector. Therefore, the contact point between the
spring and the half-plane will move in the direction of the elastic displacement. On the
other hand, this velocity will be directed tangentially to the inner circle with radius rc,
which means that the elastic displacement of the spring is directed tangentially to this
circle, as shown in Fig. 1. The dissipation power is then obviously given by the equation
2
macro macro 0
cos 1 ( / )
zz
W v F v F l R
, (2)
where vmacro is the absolute velocity of the spring motion. For one cycle of motion with
radius R>l0 the value of the dissipated energy is
2
cycle 0
2 1 ( / )
z
W W t R F l R
, (3)
where Δtcycle is the time needed to perform one cycle of circular motion. If the initial position
of the spring does not correspond to the stationary one, it moves on a spiral asymptotically
approaching the circle with radius rc as shown in Fig. 1b.
Fig. 1 a) The scheme of a circular motion of a single spring; b) The results of the numerical
simulation: the evolution of the trajectory of a single spring during a circular motion
3. ENERGY DISSIPATION IN A CURVED CONTACT FOR CIRCULAR MOVEMENT
Generally, a non-conforming contact between elastic solids cannot be modeled with a
single spring. In the case of uni-axial in-plane loading, the contact problem can be reduced
to a contact of a rigid plane profile with a series of independent springs. This method is
known as the method of dimensionality reduction [5, 6, 11]. It replaces a contact between
two continuum bodies with an ensemble of independent one-spring problems and thus
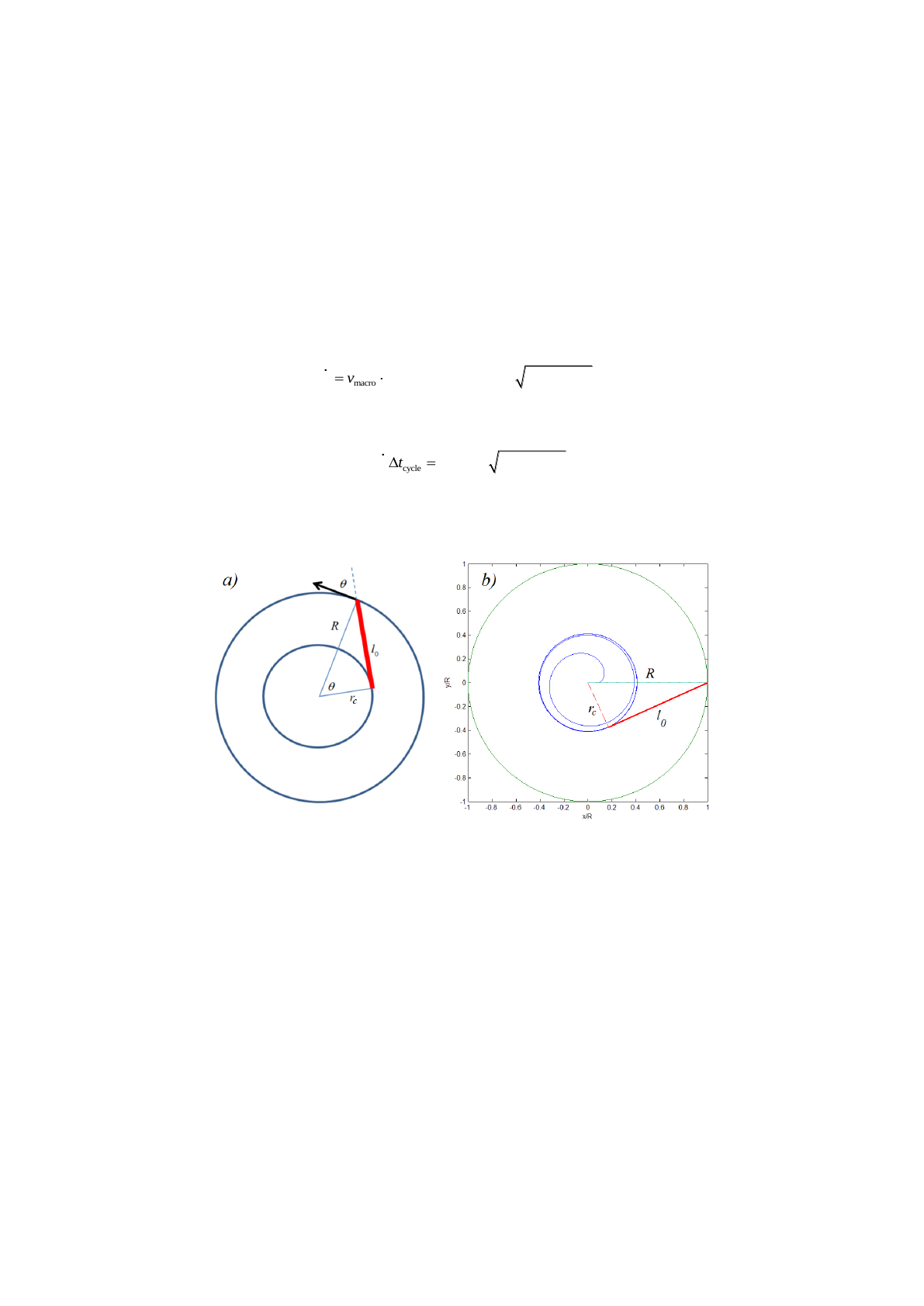
reduces the general contact problem to the above one-spring problem (see Fig. 2).
298 A.V. DIMAKI, R. POHRT, V.L. POPOV
Fig. 2 Mapping of a three-dimensional contact into one-dimensional one
If the MDR-procedure was applicable to the bi-axial in-plane loading, then we could
compute the energy dissipation rate just by summing Eq. (2) over all effective springs of
the MDR-model. Let us assume at this point that this is indeed possible and calculate the
dissipation in a circularly moving and curved contact. Later we will check and discuss the
accuracy of this procedure.
We consider the movement of a parabolic indenter having the shape z=f(r)=r2/(2r0).
According to the MDR-rules [5, 6], in the equivalent MDR model it is to be replaced by
the plane profile
2
22 0
0
( )d
()
xf r r x
g x x r
xr
. (4)
This profile is brought into contact with an elastic foundation consisting of independent
springs, each spring having normal stiffness Δkz and equal tangential stiffnesses Δkx and
Δky for the displacements along the
x
-axis and
y
-axis (not shown in Fig. 2) which are
defined according to the rules
**
,
z x y
k E x k k G x
, (5)
where
22
12
*12
11
1
EE
E
and
12
*12
(2 ) (2 )
1
44GG
G
, (6)
with E1 and E2 being the Young’s moduli, G1 and G2 the shear moduli and ν1 and ν2 the
Poisson’s ratios of the contacting bodies. Further, throughout the paper, we assume that
the contacting materials satisfy the condition of “elastic similarity”
12
12
1 2 1 2
GG
, (7)
which guarantees the decoupling of normal and tangential contact problems [12].
If the indentation depth is d, then the vertical displacement of an individual spring at
position x is given by
,1 ( ) ( )
zD
u x d g x
(8)
and the normal force of a single spring equals to
*
( ) ( ( )) ( ( ))
zz
F x k d g x E x d g x
. (9)
Simulation of Frictional Dissipation under Biaxial Tangential Loading... 299
The dissipation power in one spring at the position x is given by Eq. (2) which we
rewrite here as
22
*
*
macro *
( ( ))
1 ( ( )) 1
z
z
x
FE d g x
W F v E x d g x
R k R
G
. (10)
Let us assume that we have a situation with partial slip. Radius c of the stick region is
determined by the condition
*
*
1
() G
d g c R E
(11)
whence
2*
*
0
1cG
dR
rE
. (12)
The whole dissipation power is thus equal to
2
*22
22
macro
22
0
2( ) 1 d
a
c
vE ax
W a x x
rac
, (13)
where
0
a r d
is the contact radius. Evaluation of the integral yields
macro
3()
2z
W v F c
, (14)
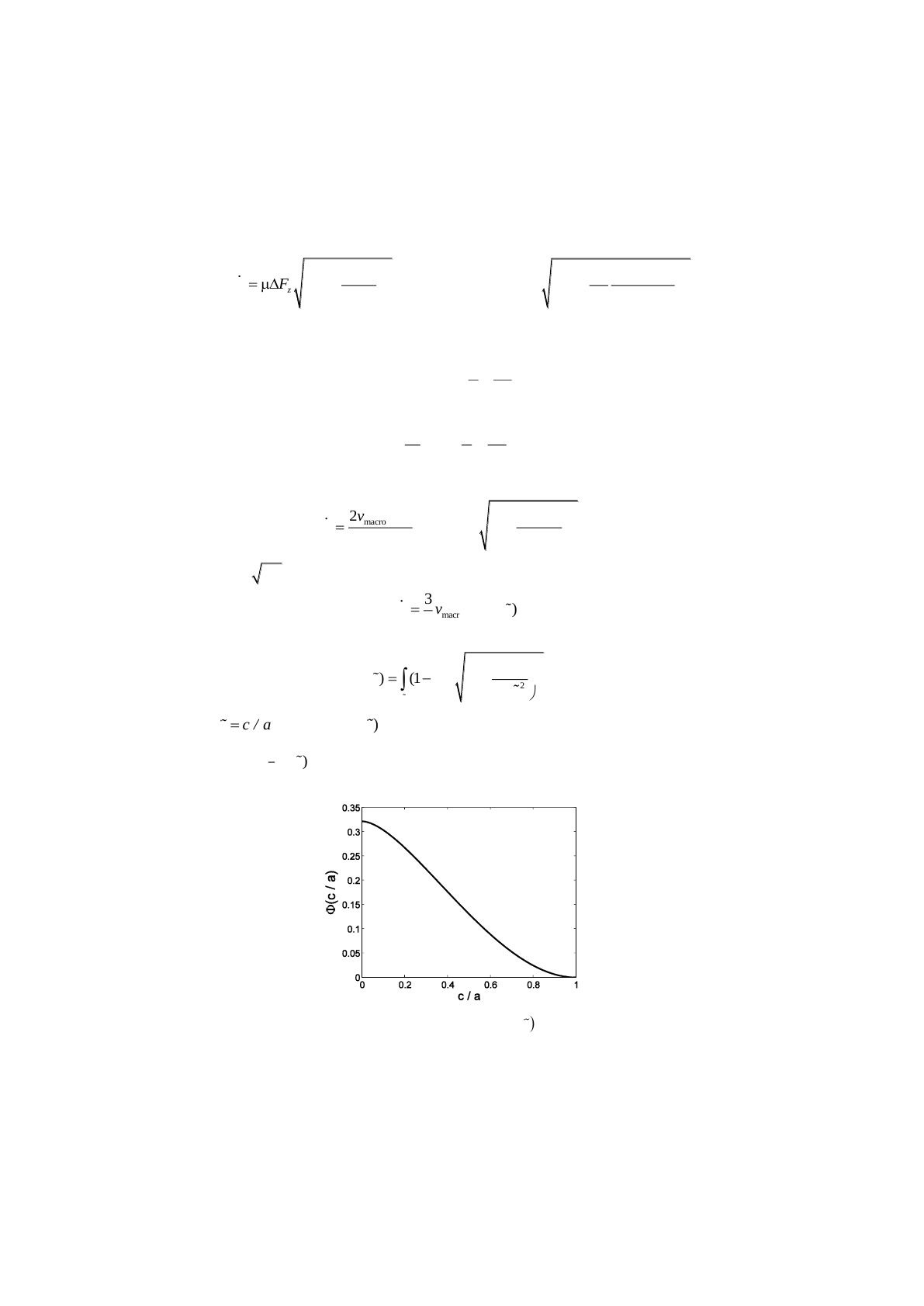
where
2
12
2
2
1
( ) (1 ) 1 d
1
c
cc
(15)
with
c c / a
. Function
()c
is shown in Fig. 3. From (14) we see that the energy
dissipation power is given by the formally calculated "nominal power" vmacroμFz multiplied
with function
3
2()c
, which only depends on the reduced radius of the stick area.
Fig. 3 Dependence
c
Loading more pages...