Vol.:(0123456789)
1 3
CEAS Aeronautical Journal (2022) 13:763–778
https://doi.org/10.1007/s13272-022-00587-1
ORIGINAL PAPER
Simplified vortex methods tomodel wake vortex roll‑up inreal‑time
simulations forfuel‑saving formation flight
HenrikSpark1 · RobertLuckner1
Received: 18 August 2021 / Revised: 25 April 2022 / Accepted: 28 April 2022 / Published online: 29 June 2022
© The Author(s) 2022
Abstract
One possibility for reducing fuel consumption is to fly in the upwind field of the wake vortex generated by an aircraft that
is flying ahead. Migratory birds use this principle. Manually flying an aircraft at the point of optimal fuel reduction is not
suited for routine flight operations as the pilot workload is excessively high. Hence, an autopilot function has to carry out this
task. For designing the autopilot, a flight mechanical simulation with a wake vortex velocity model is required that has the
ability to calculate the vortex-induced velocity fields. This paper contributes to the choice of a real-time simulation method
for modelling vortex-induced velocities that the wake vortex of a leading aircraft generates and that the trailing aircraft shall
use during fuel-saving formation flight.Two different wake vortex velocity models are introduced and compared during
steady, horizontal flight. One model is based on the Lifting Line Method (LLM) and the other on the unsteady Vortex Lat-
tice Method (VLM). Both models are able to calculate the wake vortex roll-up phase for arbitrary lift distributions, whereas
the commonly used Single Horseshoe Vortex Model (SHVM) ignores the near-field roll up. The differences in the induced
upwind distribution and vortex filament position are analysed for coarse spatial and temporal discretisation that the real-time
constraint requires. Despite the more stringent simplifications of LLM, both methods yield similar filament positions and
similar velocity fields for the same discretisation of the lifting surfaces. Finally, the influence of the discretisation parameters
is discussed and parameter values are recommended for using VLM and LLM in real-time flight simulations.
Keywords Wake vortex modelling· Fuel saving formation flight· Real-time flight simulation· Vortex Lattice Method·
Lifting Line Method
List of symbols
b Wing span [m]
b0
Vortex pair spacing [m]
CL
Lift coefficient [–]
d𝐥
Discrete vortex filament segment [m]
H Altitude [m]
l(y) Chord length [m]
rc
Core radius [m]
𝐫
Distance vector [m]
sv
Vortex spacing parameter [m]
V Airspeed [m/s]
𝛼
Angle of attack [
◦
]
Γ
Circulation [
m2∕s
]
Γ0
Root circulation [
m2∕s
]
𝜌
Air density [
kg∕m3
]
Subscript/abbreviation
a Aerodynamic coordinate system
f Body coordinate system
ind Induced
W Wing
HTP Horizontal tailplane
TE Trailing edge
1 Introduction
Aviation has to noticeably reduce its environmental impact.
Innovative airframe and engine concepts as well as sus-
tainable aviation fuels shall contribute [1]. Also aircraft
operations shall be part of the solution [2]. Even though not
explicitly mentioned in Refs. [1, 2], it is long known that for-
mation flying techniques, inspired by migratory birds, have
the potential to significantly save energy. Transport aircraft
* Henrik Spark
1 Chair ofFlight Mechanics, Flight Control andAeroelasticity,
Institute ofAeronautics andAstronautics, Technical
University ofBerlin, Marchstr. 12, 10587Berlin,
Deutschland

764 H.Spark, R.Luckner
1 3
can use this technique as well. The Applied Vehicle Tech-
nology (AVT) Panel of the NATO Science and Technology
Organization (STO) has published a comprehensive over-
view on the state of the art of formation flight and the related
research activities including an extensive reference compi-
lation [3]. The overview addresses the history of energy-
saving formation flight, the physical principles, related tech-
nologies and systems, as well as operational aspects.
In a formation, the following aircraft can reduce its thrust
and hence its fuel consumption, when flying in the upwind
field of a wake vortex that a leading aircraft generates. So,
the trailing aircraft takes advantage of wake energy that
otherwise is left unused. The position for maximum fuel
savings in a vortex-induced velocity field is called sweet-
spot. For flying in the sweet-spot, the trailing aircraft has to
control its position relative to the leader. During long haul
flights, where the sweet-spot position has to be maintained
over many hours, formation flight needs to be automated.
This automation requires new autopilot functions. For the
development of such autopilot functions, a flight mechanical
model with a realistic wake vortex velocity model is needed
to simulate the vortex-induced forces and moments. Vortex
methods, as comprehensively described in Ref. [4], are used
for generation of vortex velocity fields. The research at the
TU Berlin aims at increasing the realism of formation flight
simulations by means of high-fidelity, real-time methods.
The objective of this paper is to evaluate the fidelity of real-
time methods for the calculation of the vortex velocity field.
Wieselberger [6] was the first who described the funda-
mental physics of formation flight by the vortex pair behind
a lifting surface. He calculated the upwind field by Biot
Savart’s Law. Schlichting [7] explained the resulting energy
savings by applying Aerodynamic Wing Theory. Hummel
[8] extended this approach to inhomogeneous formations.
In 1986, Beukenberg and Hummel demonstrated the theo-
retically explained energy savings by flight tests for the first
time [9, 10]. Further flight tests with different aircraft types
confirmed fuel savings up to 18%, for example in Ref. [11].
A simple vortex model that is commonly used for simula-
tions of formation flight and wake vortex encounters is the
Single Horseshoe Vortex Model (SHVM). It approximates
the wake vortex system by a pair of two straight vortices, see
Refs. [5] and [12]. This vortex model represents a rolled-up
vortex. It is valid from 15 up to 150 wing spans behind an
aircraft. Hence, it is not well suited to model the near field of
the wake that extends up to 15 wing spans behind the vortex
generating aircraft. As formation flight can be in within the
near field, modelling the vortex roll-up increases realism.
Sarpkaya [13] comprehensively reviews the computa-
tional methods that are developed in fluid mechanics to sim-
ulate and describe the characteristics of three-dimensional,
unsteady vortical flows. The application of those methods
to real-time flight simulator investigations is not straight
forward, as the real-time requirements on the computational
performance significantly differ from accuracy requirements
for fluid dynamic applications.
Fuel-saving formation flights are assumed to be carried
out when atmospheric turbulence is so low that decay and
deformation of the wake can be neglected for the envisioned
separation distances. However, to investigate cockpit pro-
cedures and pilot workload in real-time flight simulators,
vortex models are necessary for distances, where the vortex
roll-up is not completed (10 wing spans are 0.5 NM for an
80 m wing span aircraft like Airbus A380). Whereas the
computational-cheap SHVM can be used for formations with
separations above 15 wing spans, more accurate methods are
needed for closer distances.
For the investigation of vortex effects on a trailing air-
craft, very high accurate methods, like Large Eddy Simula-
tions (LES), have been applied, e.g. by Bieniek etal. [14].
There, the vortex flow field was pre-computed for a cer-
tain distance behind the generating aircraft and stored in
a “box”, from which the wind field can be used. If LES is
not available, LLM can be used in a similar manner—with
some loss of realism. However, such simulation techniques
require steady flight conditions. If the formation is manoeu-
vring, e.g. changing altitude or course, a pragmatic solution
to stay with the “box” technique by adapting the box loca-
tion and orientation in space was proposed by Kaden [15].
A superior approach would be to use methods, like LLM or
VLM that can online address the impact of the lift changes
of the vortex-generating aircraft and the impact on the wing.
However, in real-time flight simulations, available CPU per-
formance constrains the discretisation granularity. The moti-
vation for this paper was to prepare the online approach by
comparing LLM and VLM vortex models using very coarse
discretisation.
Research on vortex methods for wake vortex roll-up simu-
lations dates back to the 1930s [16]. Numerical problems
resulting from this approach and methods permitting their
resolution have coined a research area, see Refs. [17–19].
In addition to summing up the state of the art, Devoria and
Mohseni [19] describe the possibility of chaotic vortex tra-
jectories in roll-up simulations. As a solution to this prob-
lem, extensions to the roll-up methods are recommended.
The extensions can, for example, rediscretise the vortex
elements, see Ref. [20], or introduce specific procedures to
regulate the distortion of the Langrangian methods, see Refs.
[21, 22].
This paper compares two well-known methods for the
calculation of the vortex velocity field: the Lifting Line
Method (LLM) and an unsteady Vortex Lattice Method
(VLM). Extensions of the LLM or VLM, as proposed by
Refs. [20–22], are not considered here. The focus is on the
comparison of the unaugmented LLM and VLM calculation
schemes and their results. Only the core radius function is
765
Simplified vortex methods tomodel wake vortex roll‑up inreal‑time simulations forfuel‑saving…
1 3
introduced as smoothing parameter. The results of the LLM
and VLM formulations are compared to the SHVM.
LLM can be used for all distances behind aircraft. Kaden
implemented the LLM code that is used at TU Berlin and
in his work. He compared it to the simple SHVM, see Refs.
[5, 15]. A set of parameters for the LLM was optimised to
match the vortex-induced velocities in the far field, where
the roll-up is complete, with SHVM. The optimised param-
eters comprise the number of vortex filaments, the integra-
tion step size
Δt
, the core radius
rc
and its regularisation
function. The calculation consists of two main steps: first, an
offline computation of the vortex particle field, and second,
the subsequent calculation of the vortex-induced velocities
at the follower’s position. Using simplifying assumptions,
the LLM’s second step, important for the formation flight
simulations, has real-time capability and is therefore cur-
rently used at TU Berlin.
Also at TU Berlin, Loftfield developed an unsteady Vor-
tex Lattice Method (VLM) for flight mechanical investiga-
tions at separated air flow as part of the project MoSS [23].
The unsteady VLM enables the calculation of wake vortex
roll-up behind manoeuvring aircraft. Less simplifications
in the VLM yield more realism compared to the LLM. But,
the VLM is computational expensive and the present for-
mulation is not suited for real-time application. Here, the
unsteady VLM is used. It is applied to a steady, horizontal
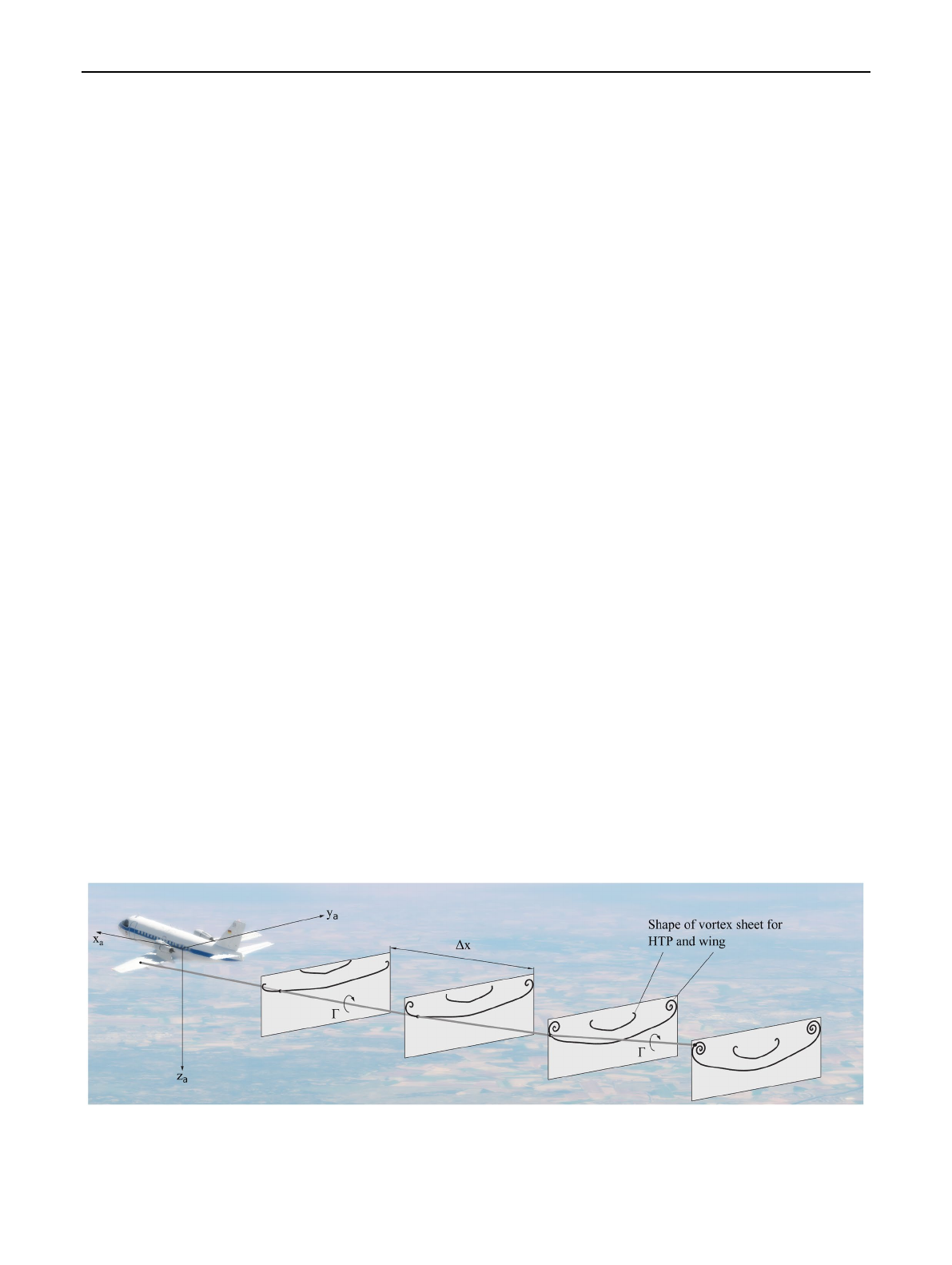
cruise flight scenario. A one kilometre long wake vortex
wind field is generated by an offline simulation. For the same
scenario, the wind field is calculated by the LLM. This is
achieved by flying the aircraft through planes and capturing
the wake properties at their locations, see Fig.1. Comparing
the results of both methods, the effect of the simplifications
made in the LLM is investigated.
For the comparison, the filament positions of the wake
vortices are analysed. The computed wind field data, result-
ing from all filament positions and circulations, are used
to identify the wake vortex axes. The axes represent the
wake vortex position. This position has to be known for
fuel-efficient formation flight. In addition to the position-
related comparison, the upwind areas in the wake vorti-
ces are compared. The vertical wind velocity maximum,
hence the maximum tangential velocity near the vortex
core, are related to the vortex-induced rolling moments, as
Bieniek has shown in Ref. [24]. Because the induced rolling
moments are important for the simulation of the following
aircraft, the vertical wind velocity maxima are used as a
substitute in our comparison.
The paper starts with the description of both wake vortex
methods LLM and VLM and the resulting models in Sect.2
addressing assumptions, differences, advantages and disad-
vantages. To enable a comparison, Sect.3 explains the meth-
odology to set up the models for a steady, horizontal flight
scenario. Section4 explains how the wake vortex axes are
identified. The identification method is used in Sect.5 for the
comparison of VLM and LLM results. Finally, an analysis of
the parameter set for this comparison is conducted in Sect.6.
2 Vortex filament methods
This section describes the methodologies behind LLM,
VLM and SHVM. SHVM is the reference as it is commonly
used in wake vortex simulations. The assumptions made by
the methods, the differences, advantages and disadvantages
of the LLM and VLM are explained.
LLM and VLM are Lagrangian methods, as described
in Refs. [4, 25, 26], tracing particles in a velocity field. The
particles are the edges of vortex filaments, which are shed
from the aircraft’s lifting surfaces. Using the Biot–Savart
law, see Sect.2.4, each filament induces a velocity on every
particle and therefore on every filament. The aircraft’s lift-
ing surfaces are modelled by vortex filaments, too. These
bound filaments also induce velocities, generating the flow
field around the lifting surfaces and influencing the wake
vortex roll-up. The mutual induced velocity of all vortex
filaments leads to a roll-up of the free filaments in the wake,
Fig. 1 Concept of the wake vortex roll-up simulation using grid planes according to Ref. [5]
766 H.Spark, R.Luckner
1 3
generating a rotational velocity field behind the left and right
wing of a leading aircraft. The induced velocity from the
opposing side induces the typical descent of the wake vortex.
In addition to calculating the induced velocity by the bound
and free filaments at the vortex filaments’ edges, the induced
velocity can be evaluated at arbitrary points to compute the
induced velocity fields.
Evaluation planes are placed behind an aircraft to calcu-
late and visualise the velocities induced by the vortex sheet
in grids. The evaluation planes can be arbitrarily placed.
They consist of a grid of particles. At the particle positions,
the local velocity is evaluated using the same operations as
for the free vortex filaments in the wake roll-up calculation.
The induced 3D velocity field is calculated from multiple
evaluation planes stacked in longitudinal
xa
-direction.
Often, an elliptical lift distribution on the wing and tail-
plane is assumed for LLMs, see Refs. [5, 12, 27]. In this
paper, the regional airliner VFW 614 that is modelled at
TU Berlin’s research flight simulator is used as example.
Detailed geometric and aerodynamic data are available,
such as the exact geometry, wing twist and airfoil profiles.
Using those data, the elliptical distribution that was used
in previous projects is replaced by a lift distribution that is
calculated by the VLM. Thus, the wind field computation
starts with the VLM calculating the circulation at the lifting
surfaces (at the bound filaments). The following steps for the
wind field generation are equivalent in the VLM and LLM.
These steps are: computing the wake vortex roll-up, calculat-
ing the induced velocities at all particles in the evaluation
planes and saving the 3D wind field data.
2.1 Single horseshoe vortex model
The Single Horseshoe Vortex Model (SHVM) satisfyingly
represents the wake vortex velocity field after roll-up and it
is commonly utilised for that purpose, see Ref. [5]. Here, it
is used as reference for the LLM and VLM.
The SHVM consists of a bounded vortex at the wing
(its influence is commonly ignored) and two straight, free
counter-rotating vortices that extend behind the generating
aircraft to infinity. The circulation of the two straight vor-
tex lines is determined by the Kutta–Joukowski law using
the actual parameters of the leading aircraft. For a certain
vortex age, vortex decay can be considered by reducing the
circulation. In [5], Kaden defined the SHVM parameters
for cruise flight (weight of 17.4 tons, altitude of 6400 m
and airspeed of
140 m∕s
) for the VFW 614, assuming an
elliptical circulation distribution. The vortex spacing is
b0=
𝜋
∕4b=16.89 m
, circulation
Γ=114.42 m2∕s
, and
global core radius
rc=0.45 b=0.9675 m
.
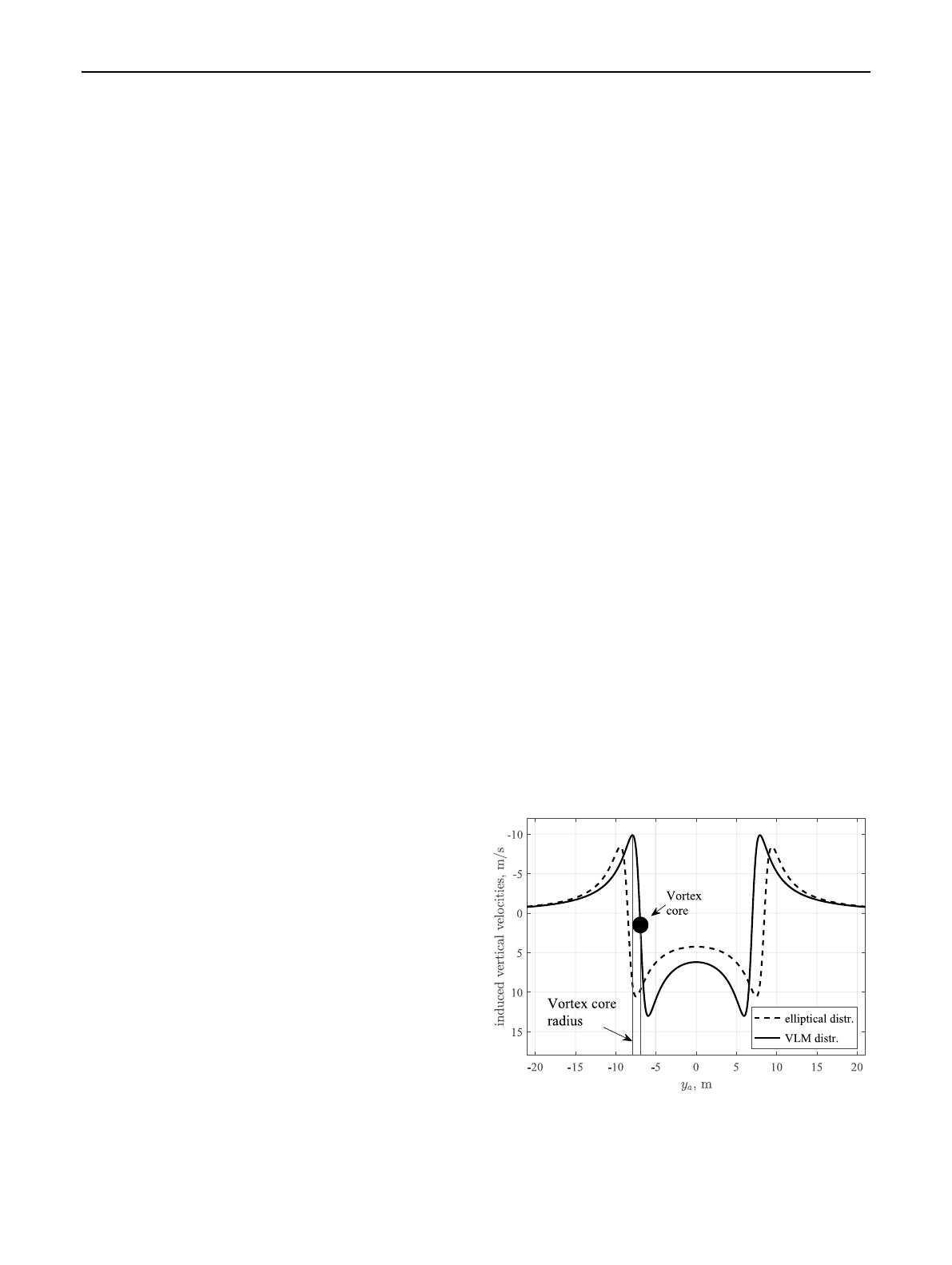
In the following, the global core radius of the SHVM has
to be distinguished from the local core radius used to com-
pute the velocities induced by the discrete vortex filaments
in LLM and VLM. Figure2 shows the resulting induced
vertical velocities for the elliptical circulation distribution
and for the distribution that is calculated by the VLM (for
discretisation 1, see Sect.3). In the VLM calculation, which
is used here, the values for aircraft mass, altitude and the
airspeed are the same as in [5] and yield
Γ=137.78 m2∕s
and a vortex spacing
b0=13.88 m
. The global core radius
rc
is the same.
2.2 Lifting line method
The LLM calculates the roll-up in several steps that are
described in [5]. The wake vortex roll-up is calculated using
multiple calculation planes for the wake vortex roll-up cal-
culation, whereas the evaluation planes describe the 3D
wind field and define the vortex-induced wind field for an
aircraft flying through the planes. Both types of planes are
stacked in negative
xa
-direction behind the aircraft in flight
direction, see Fig.1. The LLM represents lifting surfaces by
lifting lines. These lines hold a certain circulation distribu-
tion
Γ(y)
. The local circulation generally increases from a
lifting surface’s tip to its root. Following the Kutta–Jouk-
owski theorem, the lift is proportional to the circulation
Γ
,
air density
𝜌
and airspeed V [28]
The axis of the lifting lines are bound to the aircraft’s quarter
chord of the aerodynamic surfaces. Here, the bound vortex
filaments originate. The continuous circulation distribu-
tion
Γ(y)
is replaced by the sum of the discrete circulations
ΔΓi
of the filaments with stepwise constant strength, see
Fig.3. Each discrete step in the bound circulation distribu-
tion produces a free vortex filament of the circulation
ΔΓi
,
see [29]. In other words, the discrete changes in the lifting
(2.1)
L=𝜌VΓ.
Fig. 2 Induced velocities of the SHVM with the VLM’s circulation
compared to the classical SHVM
767
Simplified vortex methods tomodel wake vortex roll‑up inreal‑time simulations forfuel‑saving…
1 3
line’s bound circulation determine the circulation of the free
wake vortex filaments.
The origin of the aerodynamic coordinate system (index
a) lies in the wing’s aerodynamic mean chord. The calcu-
lation planes span in
ya
- and
za
-direction. The roll-up of
the free vortex filaments is calculated for each plane. The
time step size
Δt
is defined by the distance between those
planes,
Δt=Δxa∕V
. One can either assume the aircraft
to travel through the planes or assume that the planes are
following the aircraft in flight. For the previously intro-
duced evaluation planes, both points of view are equiva-
lent as the resultant wake age at each evaluation plane is
the same both ways when flying with a constant speed V.
The calculation planes are iteratively solved in the LLM
to calculate the wake shape. So, visualising the calculation
planes behind the aircraft and extending the wake shape in
each time step to the next gate is preferred. Another cal-
culation plane is added each time step to extend the wake
shape. The iterative calculation starts from the position of
the lifting lines and employs the forward Euler integration
method. In each calculation plane, the vortex filaments are
assumed to be straight and aligned with the
xa
-axis. By
this approximation, the induced velocity in
xa
-direction
vanishes and the roll-up is simplified, see Ref. [5]. So,
the LLM only uses the preceding calculation plane that
contains the last position of the free filaments to compute
the next position of the free filaments. The influence of
the bound filaments is considered, but it vanishes down-
stream. By using this approximation instead of calculating
the induced velocities from streaklines, the algorithm time
complexity of the calculation decreases.
As a result of this scheme, the runtime of the LLM scales
linear with the number of computation planes. Thus, it scales
linear with the wake vortex length. The runtime scales quad-
ratically with the number of vortex filaments, as all vortex
filaments interact. However, a disadvantage of LLM is, that
the lifting line’s circulation distribution has to be prescribed,
considering the necessary total lift of the aircraft. This can
either be done by assuming an elliptical distribution or, as in
this paper, by calculating the distribution for example with
the VLM.
2.3 Vortex lattice method
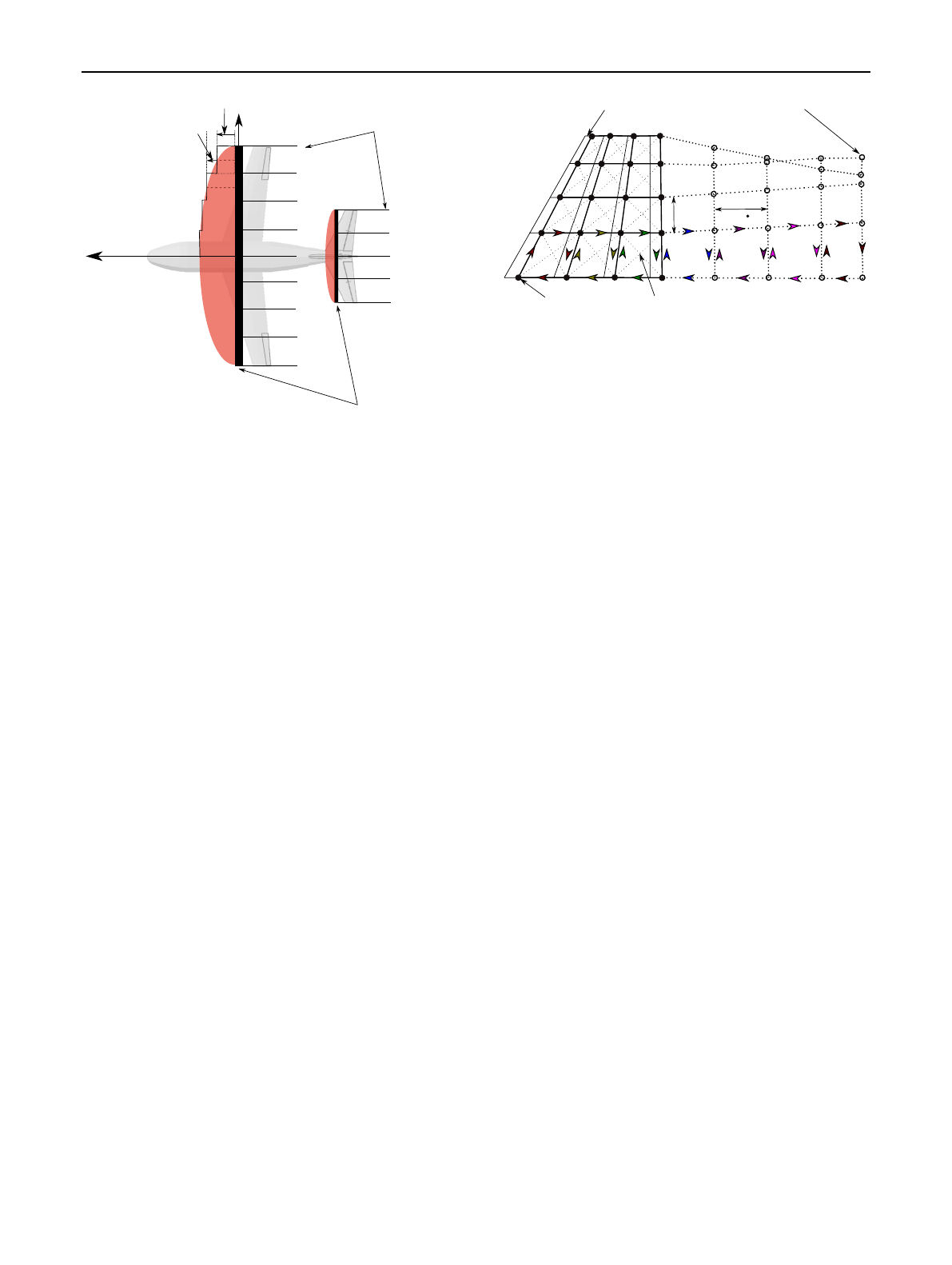
The unsteady Vortex Lattice Method (VLM) uses a lat-
tice of vortex filaments to represent the lifting surfaces and
the wake, as Fig.4 shows. Each lattice consists of indi-
vidual vortex rings, each vortex ring comprises four vortex
filaments.
Panels model the aircraft’s lifting surface geometry, as
described in Sect.3. Based on the panel position and the
convention to place the vortex rings’ leading segments at
the panels’ quarter chord [28], the vortex lattice geometry
is derived accordingly, see Fig.4. Each vortex ring has the
same oriented circulation
Γij
(circulation of panel i at sec-
tion j) for all four filaments of the ring, see Ref. [28]. The
vortex rings placed on the panel geometry are bound to that
geometry. Their circulation
Γij
is calculated so a no-flow-
through condition is reached at the collocation points. The
collocation points are placed at the centre of the vortex rings,
therefore at three quarter of the panels chord. The condition
that no flow passes through surfaces causes a tangential air-
flow over the lifting surfaces.
The free vortex rings representing the wake are gener-
ated at the lifting surfaces’ trailing edges and move with
their individual local velocity. Obeying the Helmholtz
theorems and the conservation of circulation [30], the cir-
culation of the free vortex rings is bound to the filaments
xa
bound vortex filaments
free vortex filaments
ΔΓ2ΔΓ1
ΔΓ1
ΔΓ2
ya
Fig. 3 Schematic of free vortex filaments origination at unswept lift-
ing lines
panel geometry
Γ1,1
bound vortex corner point
free vortex corner point
XXX
X
X
X
XXX
XX
X
collocation point
Γ2,1 Γ3,1 Γw,1,1 Γw,2,1 Γw,3,1 Γw,4,1
Δx
Δy =Δt V
Fig. 4 Vortex lattice formed by four filaments per vortex ring,
adapted from [28] and [23]
Loading more pages...