J. Appl. Geodesy 2022; aop
Sattar Isawi*, Harald Schuh, Benjamin Männel, and Pierre Sakic
Stability analysis of the Iraqi GNSS stations
https://doi.org/10.1515/jag-2022-0001
Received January 9, 2022; accepted February 20, 2022
Abstract: The Iraqi GNSS network was installed in 2005
with help from the USA and UK. The network consists of
seven GNSS stations distributed across Iraq. The network
GNSS data have been comprehensively analyzed in this
study; this, in turn, allowed us to assess the impact of var-
ious geophysical phenomena (e. g., tectonic plate motion
and Earthquakes) on its positional accuracy, stability, and
validity over time. We processed daily GPS data, spanning
over more than five years. The Earth Parameter and Or-
bit System software (EPOS.P8), developed by the German
Geoscience Research Center (GFZ), was used for data pro-
cessing by adopting the Precise Point Positioning (PPP)
strategy. The stacked time series of stations coordinates
was analyzed after estimating all modeled parameters of
deterministic and stochastic parts using the least-squares
technique. The study confirmed a slight impact of the re-
cent M 7.3 Earthquake on the Iraqi GNSS stations and con-
cluded that the stations are stable over the study period
(2013 up to 2018) and that the GNSS stations represent the
movement of the Arabian plate.
Keywords: CORS, time series analysis, power-law noise,
IGRS
1 Introduction
The crucial part of national infrastructure is establishing
an accurate spatial reference system that can be realized
by a reliable geodetic network of permanent control sta-
tions. These stations are referenced to a well-defined coor-
*Corresponding author: Sattar Isawi, Technische Universität Berlin,
Institute of Geodesy and Geoinformation Science, Strasse des 17.
Juni 135, 10623 Berlin, Germany, e-mail:
sattar.mb.isaw[email protected]u-berlin.de
Harald Schuh, Technische Universität Berlin, Institute of Geodesy
and Geoinformation Science, Strasse des 17. Juni 135, 10623 Berlin,
Germany; and GFZ German Research Centre for Geosciences,
Department of Geodesy, Telegrafenberg, 14473 Potsdam, Germany,
e-mail: harald.schuh@gfz-potsdam.de, ORCID:
https://orcid.org/0000-0001-5443-0370
Benjamin Männel, Pierre Sakic, GFZ German Research Centre for
Geosciences, Department of Geodesy, Telegrafenberg, 14473
Potsdam, Germany, e-mails: benjamin.maennel@gfz-potsdam.de,
pierre.sakic@gfz-potsdam.de, ORCID:
https://orcid.org/0000-0003-2938-1356 (B. Männel),
https://orcid.org/0000-0003-1770-0532 (P. Sakic)
dinate system to be the backbone of the nation’s geospatial
system (e. g., geodatabase and mapping systems).
Iraq followed this approach after the war in 2003
because reconstruction demanded implementing major
engineering projects. Moreover, the implementation of
these projects needs a stable and reliable geodetic basis.
Therefore, in 2005, Iraq established a new geodetic refer-
ence system called the Iraqi Geospatial Reference System
(IGRS). Since the establishment of IGRS, all new Iraqi en-
gineering projects and mapping systems were based on
it, specifically Oil & Gas, Transportation, Electrics, and
Agricultural projects. IGRS realized as a coincidence with
ITRF2000 at epoch 1997.0 but anchored to the Arabian
plate by five permanent GNSS stations [32]. In principle,
IGRS represents a snapshot of the Arabian plate’s dynamic
on which Iraq lies. Furthermore, IGRS is a dynamic ref-
erence frame that continuously moves with the Arabian
plate motion [10]. Besides, Iraq locates at the boundary be-
tween two different tectonic plates, Arabian and Eurasian
plates (Fig. 1). This area is deformable and continuously
unstable, as shown by several Earthquakes, for exam-
ple M 7.3 Iraq – Iran border earthquake on November 12,
2017 [26]. Quantifying the influence of such geophysical
processes on the stability of the Iraqi permanent GNSS sta-
tions necessitates an in-depth and comprehensive study
because of its significant impact on the present and future
geodetic surveying in Iraq.
The remarkable development of space geodetic tech-
niques (e. g., Global Navigation Satellite Systems GNSS)
made it easy to obtain continuous 3D positions for points
on Earth’s surface for very long periods of up to many
years. The obtained positions are characterized by suffi-
cient accuracy to monitor the GNSS station’s antenna posi-
tion change over time. This change indirectly refers to var-
ious physical processes in the Earth system (e. g., tectonic
plate motion).
Based on this proposition, several researchers stud-
ied the movement of the Arabian plate by adopting space
geodetic techniques. For example, [3] studied the Arabian
plate motion by estimating the Riyadh SLR station’s posi-
tion and velocity. Laser-ranging observations of 14 years
from 20 SLR stations to LAGEOS-1 and LAGEOS-2 have
been analyzed in this study. They concluded that the Ara-
bian plate is countering a north-east motion with an an-
nual linear rate of 42.9 mm/year. [11] processed ten years
of daily GPS data from two Iraqi GNSS stations. ISER, lo-
cated in Erbil, and ISNA, located in Najaf. The GITSA anal-
Open Access. © 2022 Isawi et al., published by De Gruyter. This work is licensed under the Creative Commons Attribution 4.0 International
License.
2| S. Isawi et al., Stability analysis of the Iraqi GNSS stations
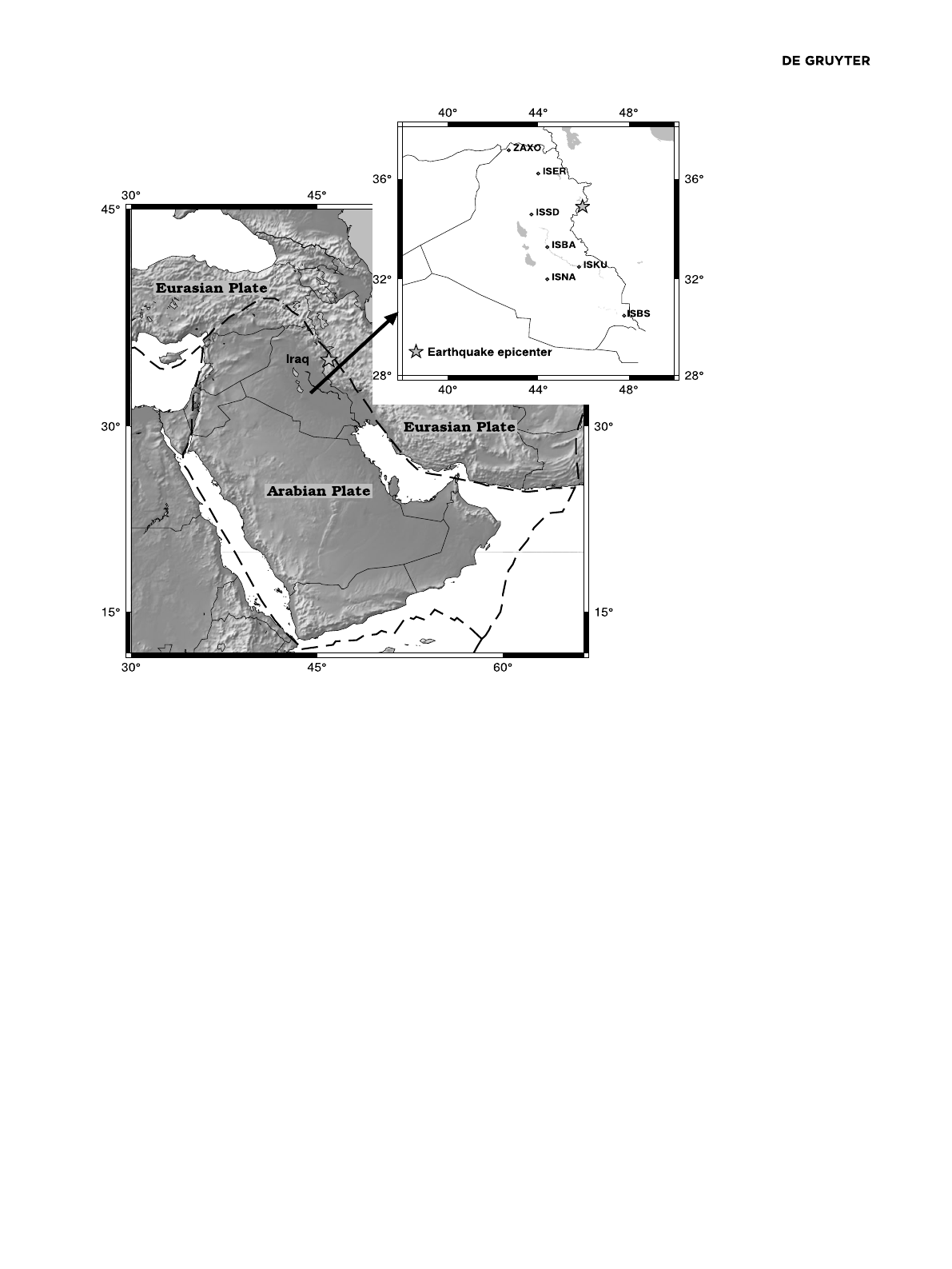
Figure 1: The spatial distribution of the Iraqi GNSS stations. The black dashed lines are the boundary of tectonic plates. The star symbol
represents the epicentre location of the M 7.3 Earthquake that hits Iraq – Iran border on November 12, 2017.
ysis software was used in this study to build up and ana-
lyze the time series of station coordinates. The study con-
cluded that the estimated velocity vectors for the ana-
lyzed stations were 38 mm/year and 40 mm/year, respec-
tively.
The estimation of linear rate (mainly driven by plate
motion) is the main focus of these studies. However, this
estimation needs an improvement to the adopted func-
tional model. The periodic effects (e. g., annual and semi-
annual deformation), sudden effects (e. g., offset due to
antenna change or co-seismic deformation), or even post-
seismic deformation have to be modeled and extracted
from the time series signal [4]. Although all common de-
terministic parts would be modeled for the time series, dif-
ferent noise sources are still present in its signal due to
satellite orbit error, atmospheric delays, and clock insta-
bility. On the other hand, the assumption that the only
white noise (uncorrelated noise) contributes to the noise
model will lead to underestimated uncertainty of linear ve-
locities by factors from three to six times [33], or even five
to 11 times [20].
The Iraqi GNSS stations will be extensively analyzed
in this study to assess the impact of various geophysical
processes (e. g., tectonic plate motion and Earthquakes) on
their accuracy, stability, and validity over the study period.
The determination of coordinate time series characteris-
tics (trend, annual signals, offsets, and spectra) will be fur-
ther described and discussed. Besides, this study will in-
vestigate the potential contribution of different noise types
(e. g., power-law noise) to the noise model. A Matlab code
comprises functions written to implement this study in
both the frequency and time domain.
2 Data
Five continuously operating GNSS reference stations have
been selected out of seven Iraqi GNSS stations for this
S. Isawi et al., Stability analysis of the Iraqi GNSS stations | 3
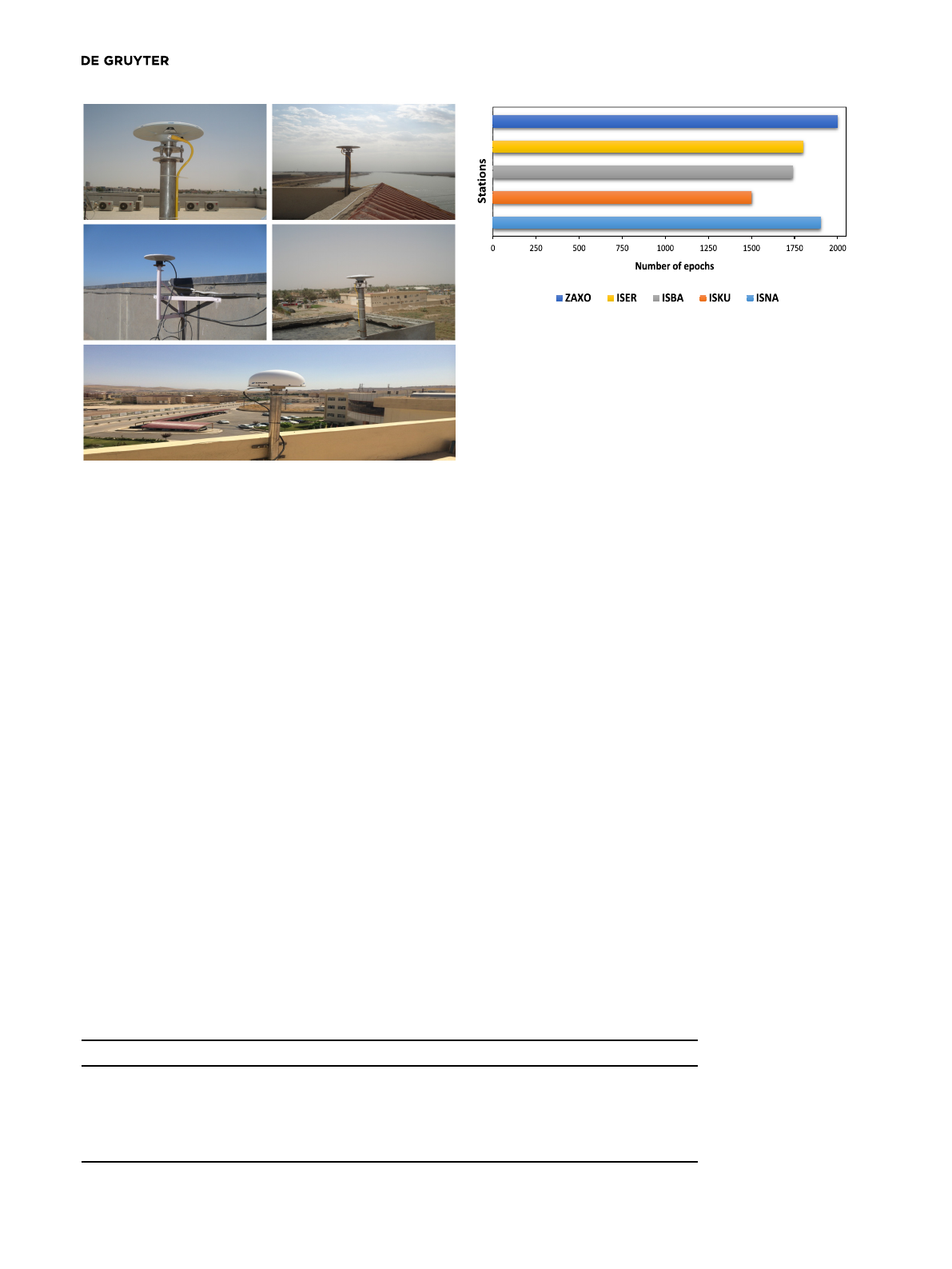
Figure 2: GPS antennas attached to the monuments. ISER, ISKU (top)
and ISBA, ISNA (middle), and ZAXO station (bottom). Source NGS at
https://www.ngs.noaa.gov/.
study. The selected GNSS stations are ISNA, ISKU, ISBA,
ISER, and ZAXO. ISBS and ISSD stations were excluded be-
cause both of them were non-operational during the inves-
tigated period. The spatial distribution of the Iraqi GNSS
stations is shown in Fig. (1). All selected GNSS stations
were equipped with dual-frequency GNSS receivers as well
as geodetic antenna types. However, all of them have non-
geodetic monuments because of the antennas mounted on
top of buildings (Fig. 2). Station ISBA is part of the Inter-
national GNSS Service (IGS) network [12], whereas the re-
maining stations are a part of the National Geodetic Survey
(NGS) global network.
The daily observation (raw data) of all GNSS stations
were downloaded from the NGS public archive at ftp://
geodesy.noaa.gov/cors/rinex/. The number of daily obser-
vation files for each station is shown in Fig. (3). The GNSS
station’s meta-data (log files) needed to track the station
history were also obtained from the NGS database system
(Table 1). The data included a comprehensive record of sta-
Figure 3: Number of daily observation files per station.
tion firmware and hardware changes (e. g., GNSS receiver
and antenna type). A pre knowledge in station history is
required in this study because the change in station hard-
ware and software could lead to offsets in the position time
series [27].
2.1 GPS daily solutions
The software package EPOS.P8, developed at GFZ, was
used to process the GPS data. Satellite orbits, clock cor-
rections, and Earth Orientation Parameters (EOP) were
provided by a GFZ internal reprocessing based on the
operational final solution [18]. The products were given
in the IGS14 reference frame. Our final solution of the
GPS daily coordinates for each station was estimated fol-
lowing the Precise-Point-Positioning (PPP) methodology
adopted in GFZ AC. The processing details (Table 11) and
the flow diagram (Fig. 8) of PPP processing are shown in
Appendix A.
3 Methods
Firstly, the 3-D Cartesian coordinates Xi,Yi, and Ziob-
tained from GNSS data processing were transformed into
topocentric North, East, and Up. The coordinate trans-
formation from the right-hand system Earth Centered
Table 1: Log files information of selected GNSS Stations.
ISNA ISKU ISBA ISER ZAXO
City Najaf Kut Baghdad Erbil Dohuk
Sat. System GPS+GLO GPS+GLO GPS+GLO GPS+GLO GPS
GPS Receiver TRM NETR9 TRM TRM NETR5 TRM NETR5 TPS NET-G3A
Ant. Type TRM57971 TRM57971 TRM41249 TRM57971 TPSCR.G5
Monum. Desc. Tribr. adap. Trib. adap. Trib. adap. Trib. adap. Trib. adap.
4| S. Isawi et al., Stability analysis of the Iraqi GNSS stations
Earth Fixed (ECEF) into the topocentric left-hand system
has been implemented according to [24]. The variance-
covariance matrix SXYZ of GNSS daily solutions have also
been transformed into the topocentric system by applying
a variance-covariance propagation law [25].
3.1 Functional model
The time series for individual topocentric components
(North, East, and Up) was built up based on the GNSS daily
solutions ytiat uniformly spaced time ti(i=1,...,n, where n
is the number of daily solutions). The stacked time series
have been modeled (approximated) as the sum of deter-
ministic parts, by considering the initial site position x0,
and linear rate vx(interpreted as the GNSS station veloc-
ity), as well as the periodic signals of annual and semi-
annual motion. The functional model reads:
yti=x0+vxti+asin(2πti)+bcos(2πti)+csin(4πti)
+dcos(4πti)+εi(1)
with aand bare the coefficients of the annual periodic
motion, while cand dare the coefficients of semi annual
motion. When there are in addition moffsets (jumps) in
the coordinate time series, the functional model can be ex-
panded to [6]:
yti=x0+vxti+asin(2πti)+bcos(2πti)+csin(4πti)
+dcos(4πti)+m
∑
j=1
fjh(ti−tfj)+εi(2)
where fjis the offset’s magnitude, tfj is the offset’s epoch
with hdenoting the Heaviside function, and εis the model
error. With apriori known offset epochs tfj, the linear model
of observation equations in Eq. (2) is solved using the least-
squares method:
x=(ATSyy−1A)−1ATSyy−1y,(3)
where the vector of adjusted unknowns
xconsists of the
following parameters:
x=[
x0
vx
a
b
c
d
f]T,(4)
Syy is the variance-covariance matrix of the observation
vector y,
y=[yt1,...,ytn]T,(5)
and, the design matrix Ais given as:
A=[[[[
1t1sin(2πt1)cos(2πt1)sin(4πt1)cos(4πt1)h(t1−tfn)
.
.
..
.
..
.
..
.
..
.
..
.
..
.
.
1tnsin(2πtn)cos(2πtn)sin(4πtn)cos(4πtn)h(tn−tfm)]]]]
(6)
Table 2: Summary of coordinate data.
Site Data Start epoch End epoch Outliers
# # %
ISBA
N 1743 2013.00 2018.99 134 7.6
E 1743 2013.00 2018.99 116 6.6
U 1743 2013.00 2018.99 145 8.3
ISNA
N 1327 2013.00 2018.99 89 6.7
E 1327 2013.00 2018.99 88 6.6
U 1327 2013.00 2018.99 51 3.8
ISKU
N 1591 2013.00 2018.99 70 4.3
E 1591 2013.00 2018.99 78 4.9
U 1591 2013.00 2018.99 100 6.2
ISER
N 1837 2013.00 2018.99 284 15.4
E 1837 2013.00 2018.99 267 14.5
U 1837 2013.00 2018.99 155 8.4
ZAXO
N 1090 2015.00 2018.99 110 10
E 1090 2015.00 2018.99 69 6.3
U 1090 2015.00 2018.99 65 5.9
3.2 Outlier detection and removal
Outliers have been detected and removed from each co-
ordinate time series during the preliminary model fitting.
The median and interquartile range approach [21] were im-
plemented in this study. The median and IQR statistics are
calculated for the residuals on a sliding window of one
year centered on each time series element to consider the
gradual decrease in the data variance associated with the
increase in the time series length. Outliers were defined as
having:
|vi−median|>1.5×IQR (7)
where IQR defines the middle 50 % of the sample data, and
viis the ith least square residual.
Summary of removed outliers for each station time se-
ries is presented in Table (2).
4 Noise characteristics and
analysis
As with many other geophysical phenomena, noise in co-
ordinate time series can be described as a power law pro-
cess of the form [2, 16]:

S. Isawi et al., Stability analysis of the Iraqi GNSS stations | 5
Pv(f)=P0(f
f0)k
(8)
where fis the temporal frequency, P0and f0are normal-
izing constants, and kis the spectral index that defines a
slope of the best fit line to the spectra presented in log-log
space [33]. A smaller spectral index implies a more corre-
lated process and a more relative power at lower frequen-
cies. Therefore such a natural process is characterized by
negative indices [13]. According to [17], the spectral index
of different geophysical phenomena is classified into two
groups. The first group is called fractional Brownian mo-
tion with spectral index −3<k< −1. The noise processes
in this interval are non-stationary including random walk
with k= −2 or(Px∝1/f2), while the second group termed
fractional Gaussian with spectral index −1<k< +1, where
the noise processes in this interval are stationary (inde-
pendent of time) including the special case of uncorrelated
white noise with k=0 or (Px∝1/f0). The special case
k= −1 or (Px∝1/f1) is known as “flicker noise”. Plenty
of studies showed that the spectral index has particular
importance because it is a good indicator for characteriz-
ing the noise source [14, 22]. Based on the preceding, it is
necessary to study the post-fit residuals in-depth to decide
which colored (correlated) noise type has to be considered
in the noise model.
Two approaches are described in the literature to clas-
sify and quantify noise in the coordinate time series. The
first approach’s implementation relies on time series anal-
ysis in the frequency domain (spectral analysis). In con-
trast, the second one relies on the time series analysis in
the time domain. In this study, we restricted ourselves to
the second approach, but in addition, only estimating the
spectral index in the frequency domain.
4.1 Noise analysis
The time series signal and its noise do not behave in the
same way when transformed and plotted as a power spec-
trum. This property can be of great benefit for noise anal-
ysis in the frequency domain. Based on this concept, the
time series of post-fit residuals have been transformed into
the frequency domain for further analysis.
Unfortunately, equipment malfunction, interruptions
in the communications network, or even outlier removal
lead to missing data in the coordinate time series. There-
fore, a Lomb-Scargle periodogram introduced by [15] and
used by [33] has been applied to solve this issue.
According to [33], the time series of post-fit residuals
must be long enough and comprise data with a range of fre-
quencies that make the power spectra well approximated.
Hence, from the practical aspect, the spectral index of the
power-law process can be estimated by fitting a straight
line to these frequencies to avoid biasing the regression es-
timate with the predominance of white noise at high fre-
quencies and decreasing the impact of outliers at lower
frequencies. The functional model of power-law process in
Eq. (8) can be reformulated as:
Pvi(f)=P0
f0kfi
k(9)
substitution leads to
W0=P0
f0k(10)
Taking the log of both sides yields
log(Pvi(f)) =log(W0)+klog(fi)(11)
where all parameters are defined as in Eq. (8). To estimate
the slope of the fitted line (spectral index k) to the spec-
tra at log-log space, the least-squares method was used.
Therefore, Eq. (3) has been applied with the design matrix
of the form:
A=[[[[[[[[[[
1 log(f1)
1 log(f2)
. .
. .
. .
1 log(fN)
]]]]]]]]]]
(12)
The spectral index has been estimated for each time se-
ries. The proper noise model was founded on a combina-
tion of white and flicker noises. Since the amplitudes of
both noises have to be known in the adopted noise model,
the contribution for each noise has been estimated in this
study using the Maximum likelihood method presented
in [30]. In this approach, the amplitudes (variances) were
estimated by explicitly maximizing the likelihood function
for the total variance σ2
σ2=
vTC−1
v
N(13)
where C is the covariance matrix of post-fit residuals, N is
the number of daily solutions, and
v is the vector of post-
fit residuals. According to [30], the covariance matrix C can
be decomposed into two components with amplitudes σ2
w
and σ2
kbeing the variance of white and power-law noises
respectively such that:
C=σ2
wIw+σ2
kJk(14)
Loading more pages...