657
Time domain modelling and stability analysis of
complex thermoacoustic systems†
M R Bothien∗,J P Moeck, A Lacarelle,and C O Paschereit
Institute of Fluid Dynamics and Engineering Acoustics (Hermann-Föttinger-Institute), Technical University Berlin,
Berlin, Germany
The manuscript was received on 31 October 2006 and was accepted after revision for publication on 11 April 2007.
DOI: 10.1243/09576509JPE384
Abstract: A methodology allowing for a modular setup of complex acoustic systems is developed.
The transfer behaviour of the individual subsystems is formulated in time domain. Subsystem
descriptions can be obtained by analytical considerations, numerical methods, or experimental
data. Once the complex subsystems have been characterized experimentally, changes in sys-
tem geometry can be implemented easily by exchanging or adding subsystems. To validate the
modelling approach, experiments are conducted in an acoustic test rig with a combustor-type
geometry. Results are compared to predictions from the model, demonstrating accuracy in fre-
quency and time domain. Application to thermoacoustic instabilities arising in lean-premixed
combustion is given.The influence of a modified fuel distribution on an unstable operating point
of a lean-premixed combustor is studied and validated with experimental data. Additionally, a
study on the parameters governing the flame transfer function is performed to generate a stability
map of a model combustor. An advantage of the state-space approach is that stability of a ther-
moacoustic system can be determined by simply solving a matrix eigenvalue problem. This is in
strong contrast to the traditional approach, where the complete model is formulated in frequency
domain with infinite-dimensional transfer functions. The time domain approach is based on the
methodology presented by Schuermans et al. [1]. In contrast to their work, however, subsystems
are not obtained from modal expansions but are characterized by using system identification
techniques. Additionally, accuracy of the time domain model is verified by experiments.
Keywords: stability analysis, state-space system, thermoacoustics, time domain simulation
1 INTRODUCTION
As emission levels for modern gas turbines become
more and more restrictive, the gas turbine industry
stays abreast of changes by using lean-premixed com-
bustion. However, the leaner a combustion system
operates the more it is prone to suddenly occur-
ring large pressure oscillations. These so-called ther-
moacoustic instabilities arise from the interaction of
∗Corresponding author: Institute of Fluid Dynamics and Engineer-
ing Acoustics (Hermann-Föttinger-Institute), Technical University
Berlin, Müller-Breslau-Straße 8, 10623 Berlin, Germany. email:
mirko[email protected]
†Extended version of a paper originally presented at the 2006 Con-
ference on Modelling Fluid Flow (CMFF’06),Budapest University of
Technology and Economics, 6–9 Sepetember 2006.
unsteady heat release and the acoustic field in the
engine. If the two mechanisms constructively inter-
fere, high amplitude pressure pulsations occur, which
have a detrimental effect on the combustion pro-
cess [2]. Among others, Dowling and Hubbard [3]
expressed this fact in terms of an acoustic energy
equation, which states that perturbations grow if their
net energy gain from the combustion–acoustic inter-
action is greater than their losses across the system
boundaries and due to dissipation.
Thermoacoustic instabilities are a major issue in gas
turbines – both in stationary and aerospace applica-
tions but also in boilers and furnaces [2,4,5]. Strong
pressure oscillations cause higher emissions of pollu-
tants (NOxand CO), decrease the engine performance
and significantly increase the noise level. If the fluctu-
ations are high enough, they can even cause structural
damage [2,6,7].
JPE384 ©IMechE 2007 Proc. IMechE Vol. 221 Part A: J. Power and Energy

658 M R Bothien,J P Moeck,A Lacarelle,andCOPaschereit
To predict unreliable and unsafe operation, it is
necessary to describe how the system’s acoustic field
couples with the heat release. A model of the acous-
tic properties, supplemented by information on the
flame response, allows for prediction and control
of combustion instabilities. Thus, maintenance rates
can be extended and the operating process can be
improved. Furthermore, a model can also be used to
formulate design constraints to new burner develop-
ments.
As full-scale engine tests are extremely costly and
time-consuming, detailed investigations of thermoa-
coustic phenomena are commonly conducted in sin-
gle burner test rigs. Due to the high complexity of
geometry and interaction mechanisms in combustion
systems,a comprehensivedescriptionoftheiracoustic
field is cumbersome [1]. Although detailed numer-
ical simulations (taking into account reaction, flow,
and acoustics) were shown to be able to accurately
calculate the thermoacoustic interaction mechanisms
in single burner configurations [8], time expense,
and computing power requirements are very high.
Schuermans et al. [9] decreased the computational
effort by coupling low-order acoustic models, repre-
senting complex impedance boundary conditions, to a
computational fluid dynamics (CFD) solver. Especially
if stability has to be assessed for a high number of
parameter combinations (as shown in section 5), the
use of a CFD code is not practicable. Moreover, as a
CFD simulation is only able to observe the dominant
mode of the instability, it is usually not possible to
assess more linearly unstable modes [10]. Additionally,
marginally stable modes cannot be detected, which
is in contrast to the network approach described in
the following. Sattelmayer and Polifke [11,12] stated
that it is extremely difficult to derive suitable mea-
sures to improve the system stability using results
of large eddy simulation (LES) calculations, although
these are able to give detailed information on the
periodic reacting flow. Therefore, methods based on
analytical modelling will remain the most appropri-
ate stability assessment tool in the relatively near
future.
One further step to reduce computational effort is
to use low-order models to describe the whole com-
bustion system. The common approach is to divide
the total system into several subsystems, which are
described by transfer functions accounting for plane
wave propagation. Connection of these subsystems
results in a low-order representation of the total
system’s acoustic properties. The network approach
has the main advantages that information about
the system’s acoustics and insight into the phys-
ical processes can be obtained very quickly [13],
which is of major importance in early design phases.
Furthermore, changes in geometry or setup, as
for example the performance of different burners,
can easily be implemented in the model by sim-
ply exchanging a subsystem. Due to this modular
setup, it is possible to incorporate an experimen-
tally determined flame transfer function in the model.
The flame–acoustic interaction is crucial for the sta-
bility of thermoacoustic systems and it is far from
trivial to represent the linear flame response accu-
rately in a CFD computation. A drawback of this
approach is the limitation to plane wave acoustics.
To overcome this problem, multi-dimensional mod-
els have to be considered. Evesque and Polifke [13]
set up a two-dimensional low-order network, which
was validated against a three-dimensional finite ele-
ment method (FEM) solver showing good agree-
ment.
Traditionally, stability analysis of thermoacoustic
systems is accomplished by setting up a low-order
network model, which is then investigated in the fre-
quency domain. This is either done by solving the
system’s dispersion relation [14,15], or by graphical
methods (Nyquist plots) as described by Sattelmayer
and Polifke [11,12]. Both the graphical approach and
finding the roots of the dispersion relation are gen-
erally not trivial but rather time-consuming tasks,
especially if stability maps have to be generated [16].
In contrast to the traditional frequency domain
approach, another procedure is followed here, by
modelling the acoustic properties of the system in the
time domain. Therefore, all subsystems are character-
ized in state-space form. For the resulting state-space
network system, only a matrix eigenvalue problem has
to be solved to perform a stability analysis, which is
numerically straightforward.Schuermansetal. [7] also
described the system in state-space form, however,
they used modal expansion techniques to describe the
individual subsystems.
Once a model for the thermoacoustic proper-
ties of the combustion system is at hand, control
strategies can be implemented to suppress the feed-
back cycle. These strategies can either be passive by
implementing changes in the combustor geometry or
introduction of damping devices (e.g. Helmholtz or
λ/4-resonators) [17,18], or active by means of open-
or closed-loop control [3,19].
The remaining parts are structured as follows: sec-
tions 2 and 3 deal with the characterization of the sub-
systems in state-space form. The modelling approach
is validated against experimental data in section 4.
Application to thermoacoustic stability analysis is
then given in section 5. Here, results from frequency
domain and state-space calculations are also com-
pared. In section 6, a simulation model is used to
predict the stabilizing influence of a modified fuel
distribution in an experimental lean-premixed com-
bustor.
Proc. IMechE Vol. 221 Part A: J. Power and Energy JPE384 ©IMechE 2007

Modelling and analysis of complex thermoacoustic systems 659
2 STATE-SPACE REPRESENTATION OF ACOUSTIC
SUBSYSTEMS
As in the frequency domain transfer matrix approach
[20], it is assumed that only plane waves propagate
between two subsystems. This assumption is valid for
elements that are coupled via ducts, for which the fre-
quencies considered are below the cut-on frequency of
the first non-planar mode. Neglecting entropy waves,
this results in two degrees of freedom for all coupling
planes. The variables accounting for that can be either
acoustic pressure pand velocity vor the Riemann
invariants of the plane wave field, denoted here with f
and gfor downstream and upstream travelling waves,
respectively. The primitive variables are related to
the Riemann invariants by p=f+gand v=f−g.
Here (as in the following), the acoustic pressure has
been scaled with the characteristic impedance ρc, the
product of density and speed of sound.
Subsequently, acoustic systems are characterized
using the scattering form, i.e. the f-wave upstream
and the g-wave downstream are treated as inputs
and, accordingly, the f-wave downstream and the
g-wave upstream are obtained as outputs.The generic
acoustic element in state-space form can then be
written as
˙
x=Ax+Bfu
gd
fd
gu=Cx+Dfu
gd
(1)
where subscripts u and d denote upstream and down-
stream positions, respectively. A,B,C, and Dare
time-invariant N×N,N×2, 2 ×N, and 2 ×2 matri-
ces, respectively, and xis the N-dimensional state
vector. The dimension of the state depends on the
acoustic subsystem to be characterized and has to
be chosen sufficiently large so that the system’s fre-
quency response is represented with acceptable accu-
racy in the frequency range considered. An inlet or exit
boundary condition can be written similar to equation
(1) as a single input single output (SISO) system.
3 SUBSYSTEM CHARACTERIZATION
The modular setup allows for different ways of describ-
ing the subsystems, i.e. by analytical considerations,
experimental data, or numerical methods (e.g. using
FEM [21]). The subsystems’ transfer functions relate
the incoming and outgoing acoustic waves. Usually,
acoustic subsystem characterization based on FEM
computations or experiments results in frequency
domain data. In the frequency domain the rela-
tion of the Riemann invariants is represented by the
scattering matrix S
fd
gu=S11 S12
S21 S22fu
gd(2)
where the elements Sij are complex-valued functions
of frequency.
Once a subsystem’s acoustic transfer function is
given in the frequency-dependent form, equation (2),
it can easily be transformed into the corresponding
state-space form (equation (1)). The elements of the
matrices of this state-space realization depend on how
the system’s state-space variables are defined. The
same input-output behaviour can be obtained from
different definitions of the system’s state variables. If
these variables are determined from the poles of a
partial fraction expansion of the elements Sij, which
is mostly the case in this article, the system matrix A
(equation (1)) assumes the so-called Jordan canonical
form. The diagonal elements then comprise the poles
of the partial fraction expansion. Detailed informa-
tion on how this and other state-space formulations
can be obtained from a transfer function in frequency
domain can be found in reference [22]. In the follow-
ing sections 4 and 5, more information on the specific
form ofthetransfer functionofeachindividual subsys-
tem is given. Here, either the scattering matrix, transfer
function, or state-space form is chosen, depending on
which formulation is more descriptive.
3.1 Analytical description
The description of elements with simple geome-
tries (e.g. ducts) is straightforward. Neglecting sound
absorption at the walls and in the fluid, a duct only
represents a time-delay (e−iωτ ) in the system, i.e. an
acoustic wave is transmitted with a delay, depending
on the elements length and the speed of sound.
It is not possible to exactly describe a system with
time-delay with a rational transfer function.Therefore,
it has to be approximated, e.g. with a Padé approxi-
mation of the exponential function. The order of the
Padé approximation, which is necessary for a suf-
ficient accuracy, depends on the desired frequency
range (100 Hz–1000 Hz in the case considered here)
and the time-delay. A duct with a length of 0.5 m at
ambient conditions requires at least an order of 8 in
the frequency band mentioned above.
3.2 Experimental description
Transfer functions of more complex subsystems can
be determined by means of experiments. For this pur-
pose, the element is regarded as a black box, for which
the four unknown elements of the scattering matrix
(equation (2)) have to be determined. This procedure
JPE384 ©IMechE 2007 Proc. IMechE Vol. 221 Part A: J. Power and Energy
660 M R Bothien,J P Moeck,A Lacarelle,andCOPaschereit
has been applied previously [23–25] and thus only a
short description is presented here.
The system given by equation (2) consists of two
equations. Thus, two linearly independent states are
necessary to solve for the four unknowns Sij. The
test states are created by successive acoustic exci-
tation on both sides of the element. To obtain the
Riemann invariants from sound pressure measure-
ments at least two microphones at two different axial
locations in a duct are necessary. In the presence of
measurement uncertainty, better results are obtained
by acquiring the pressure at more (n) positions. Hav-
ing data of more than two microphones, the problem
is over-determined. This approach is called the multi-
microphone method (MMM) [24]. The up- and down-
stream travelling waves are fitted to the measured
quantities by means of the least squares method
f
g=Z+⎡
⎢
⎣
p1
.
.
.
pn
⎤
⎥
⎦(3)
where Zis given by
Z=⎡
⎢
⎢
⎣
e−iωx1
c+u0eiωx1
c−u0
.
.
..
.
.
e−iωxn
c+u0eiωxn
c−u0
⎤
⎥
⎥
⎦
(4)
Here, xiis the distance of microphone ito the
reference plane, i.e. the location where fand gare
determined. Z+denotes the pseudo-inverse of Z
Z+=(ZTZ)−1ZT(5)
where the superscripts −1 and T denote the inverse
and the conjugate transpose of a matrix, respectively.
4 EXPERIMENTAL VALIDATION OF THE
STATE-SPACE APPROACH
4.1 Experimental setup
The network approach based on state-space models
described in the preceding section was validated in an
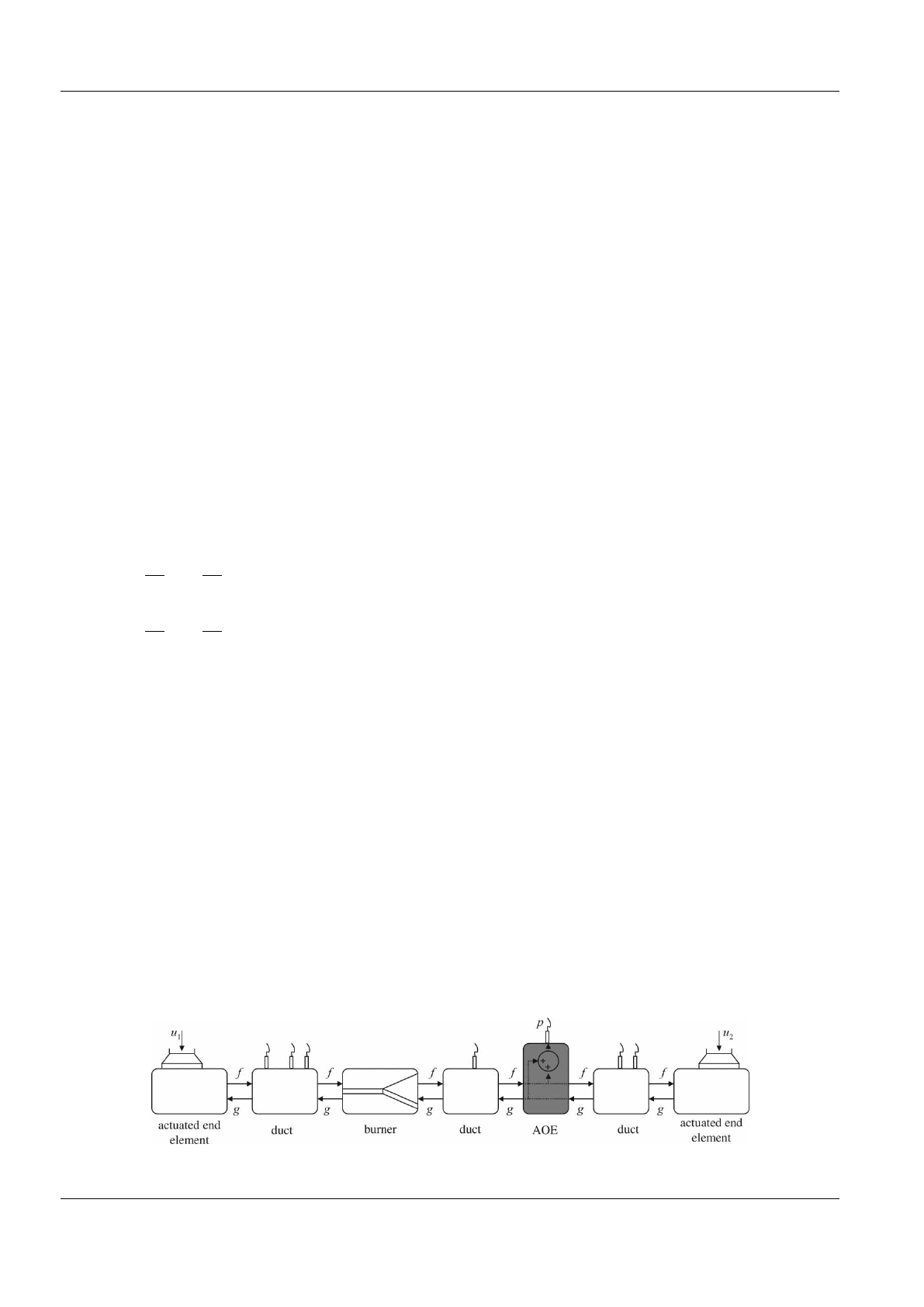
acoustic test rig. Figure 1 shows a schematic overview
of the experimental facility.
The model for the test rig is split into subsystems,
whose scattering matrices were determined exper-
imentally (burner, up-, and downstream end) and
analytically (ducts). Interconnection of the subsys-
tems yields a model for the test rig, which can be used
to predict its acoustic field.
The up- and downstream ends are equipped with
circumferentially mounted loudspeakers, which allow
for acoustic excitation of the rig. With these loud-
speakers, it is possible to adjust the linearly indepen-
dent test states that are necessary to experimentally
obtain a system’s scattering matrix. For the determi-
nation of the acoustic field, the test rig’s duct sections
are instrumented with 1/4 condenser microphones.
There are three microphones upstream of the burner
element and four downstream, thus allowing for the
application of the MMM.
4.2 Setup of the simulation model
4.2.1 Loudspeaker elements
The speaker elements’ transfer functions were deter-
mined experimentally. The elements have two inputs
and one output. In the case of the upstream element,
the g-wave and the loudspeaker voltage u1are the
inputs while the f-wave represents the output. In the
frequency domain this can be written as
f=Rg +Gu1(6)
where Ris the reflection coefficient and Gthe transfer
function of the loudspeaker’s controlling input volt-
age to the outgoing f-wave. Equation (6) implies the
assumption that the contribution of the reflection
coefficient and the loudspeaker transfer function can
be linearly superimposed. Results shown in section 4.3
confirm the validity of this assumption.
Similar to the approach described previously, two
excitation states have to be generated. This is achieved
using loudspeaker excitation at each side separately.
Downstream excitation (index A) yields
fA=RgA(7)
from equation (6) as u1is zero. This allows for direct
calculation of the reflection coefficient R. Excitation
Fig. 1 Schematic overview of the acoustic test rig splitted up into its subsystems
Proc. IMechE Vol. 221 Part A: J. Power and Energy JPE384 ©IMechE 2007
Modelling and analysis of complex thermoacoustic systems 661
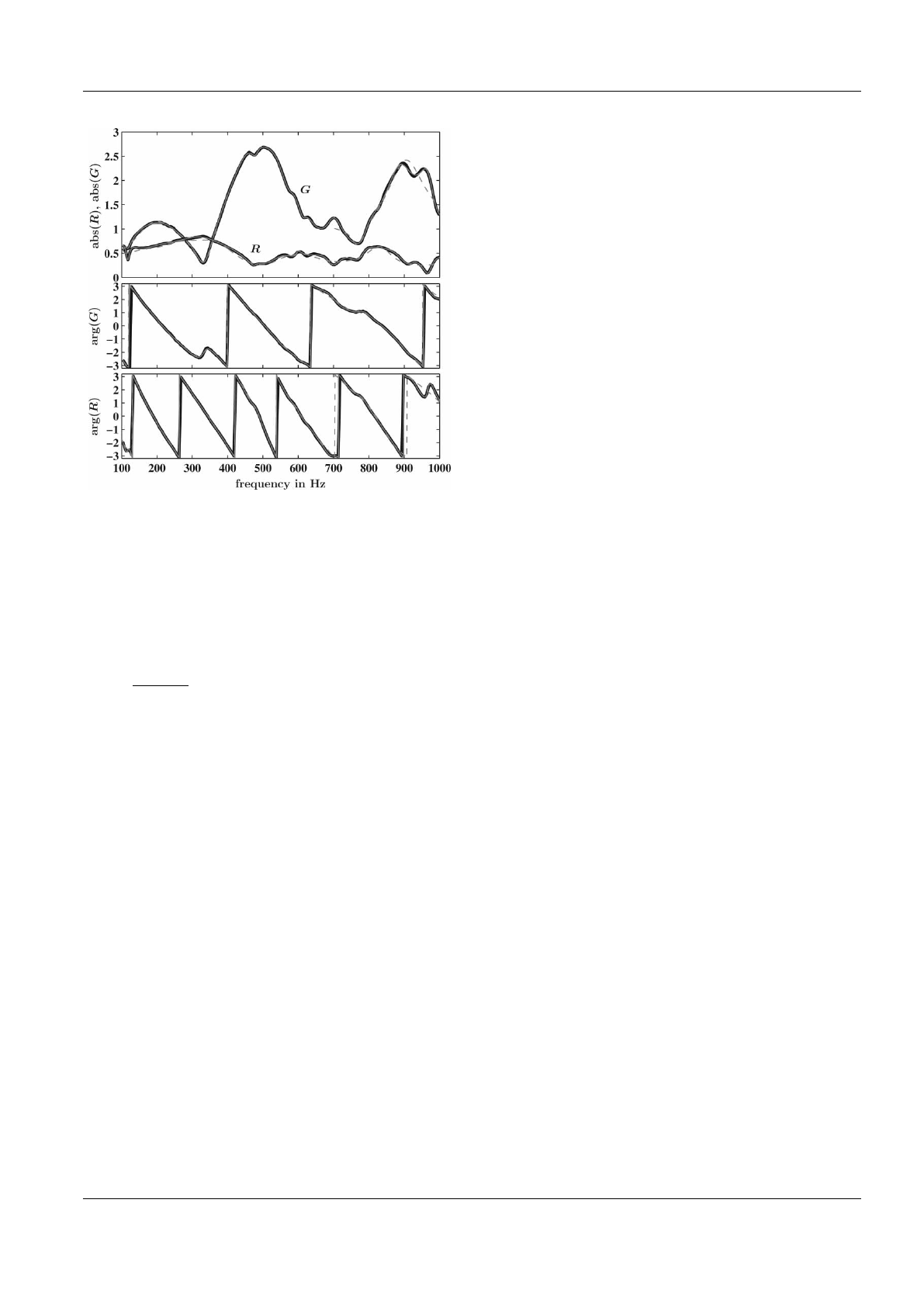
Fig. 2 Loudspeaker transfer function (G) and reflection
coefficient (R) for measured values (black), model
with 30 states (grey), and model with 15 states
(grey dashed). Top: absolute value, middle: phase
of G, bottom: phase of R
with the upstream loudspeaker (index B) and solving
for Ggives
G=fB−RgB
u1
(8)
where Ris calculated from equation (7).
With complex values for Rand Gcalculated at
discrete frequencies, frequency domain system iden-
tification algorithms [26,27] were used to obtain
state-space models. As stated before, the frequency-
dependent transfer functions are approximated by
partial fraction expansions. The number of poles used
for this expansion determines the number of states
of the state-space system. Figure 2 depicts gain and
phase of Rand G. Results for measured data as
well as for models identified with 30 states and 15
states are shown.
As can be seen in Fig. 2, measured and computed
curves for gain and phase of the reflection coefficient R
modelled with 30 states match almost perfectly. In the
frequency regime above 700 Hz, the model obtained
with 15 states shows minor deviations. In the case of
the loudspeaker’s transfer function G, excellent results
are obtained with 30 states. With 15 states, the results
are fair except for some frequency bands, in which G
has several local extremal values. Regarding the phase,
both models agree well with the measured values. The
larger slope of R, i.e. the larger time-delay, is due to
the position of the loudspeaker. The incident wave
travels to the upstream element’s end and back to
the reference plane, whereas the emitted wave of the
loudspeaker has to travel a much shorter distance.
Up to this point, only two SISO state-space systems
exist. These have to be concatenated to a double input
single output state-space system, which completely
describes the upstream end
˙
x=AR0
0AGx+BR0
0BGg
u1
f=[CRCG]x+[DRDG]g
u1(9)
Indices Rand Gdenote the matrices of the reflec-
tion coefficient’s and the loudspeaker’s state-space
systems, respectively.
4.2.2 Artificial output element
The grey highlighted element in Fig. 1, is not part of
the real system but only an artificial component of the
model system. Through this, it is possible to access
the signal of any microphone by placing the artificial
output element (AOE) at the position of the desired
microphone. The element is modelled in state-space
as a static gain without additional dynamics
⎡
⎣
fd
gu
p
⎤
⎦=⎡
⎣
10
01
11
⎤
⎦fu
gd(10)
Besides the Dmatrix, all other matrices of the state-
space system (A,B, and C) are empty. The output
element has a physical length of zero. The up- and
downstream travelling waves are neither delayed nor
changed in amplitude and therefore, the output ele-
ment does not influence the acoustic behaviour of the
total system.
4.2.3 Interconnected complete system
The outputs of each subsystem have to be con-
nected with the inputs of its adjacent subsystems.
Linking together the subsystems’ state-space repre-
sentations results in one single state-space model for
the complete system. The interconnection is exem-
plarily shown for two adjacent subsystems of the
acoustic test rig.
The transfer behaviour of a subsystem defines the
relation betweenincidentandoutgoingwaves.Bycon-
necting the two subsystems‘duct’ and‘burner’ (Fig. 3),
one system is obtained with the Riemann invariants f1
and g3as inputs and g1and f3as outputs. Thus, the
two systems of equations describing the individual
subsystems are now combined to one, representing
the transfer behaviour of the connected system. This
combination is a matrix operation referred to as the
JPE384 ©IMechE 2007 Proc. IMechE Vol. 221 Part A: J. Power and Energy
Loading more pages...