Friction ISSN 2223-7690
https://doi.org/10.1007/s40544-020-0482-0 CN 10-1237/TH
RESEARCH ARTICLE
Adhesion and friction in hard and soft contacts: theory and
experiment
Valentin L. POPOV1,2,*, Qiang LI1,*, Iakov A. LYASHENKO1,3, Roman POHRT1
1 Technische Universität Berlin, Berlin 10623, Germany
2 National Research Tomsk State University, Tomsk 634050, Russia
3 Sumy State University, Sumy 40007, Ukraine
Received: 02 June 2020 / Revised: 14 October2020 / Accepted: 10 December 2020
© The author(s) 2020.
Abstract: This paper is devoted to an analytical, numerical, and experimental analysis of adhesive
contacts subjected to tangential motion. In particular, it addresses the phenomenon of instable, jerky
movement of the boundary of the adhesive contact zone and its dependence on the surface roughness. We
argue that the "adhesion instabilities" with instable movements of the contact boundary cause energy
dissipation similarly to the elastic instabilities mechanism. This leads to different effective works of
adhesion when the contact area expands and contracts. This effect is interpreted in terms of “friction” to
the movement of the contact boundary. We consider two main contributions to friction: (a) boundary line
contribution and (b) area contribution. In normal and rolling contacts, the only contribution is due to
the boundary friction, while in sliding both contributions may be present. The boundary contribution
prevails in very small, smooth, and hard contacts (as e.g., diamond-like-carbon (DLC) coatings), while
the area contribution is prevailing in large soft contacts. Simulations suggest that the friction due to
adhesion instabilities is governed by "Johnson parameter". Experiments suggest that for soft bodies
like rubber, the stresses in the contact area can be characterized by a constant critical value.
Experiments were carried out using a setup allowing for observing the contact area with a camera
placed under a soft transparent rubber layer. Soft contacts show a great variety of instabilities when
sliding with low velocity – depending on the indentation depth and the shape of the contacting bodies.
These instabilities can be classified as "microscopic" caused by the roughness or chemical inhomogeneity
of the surfaces and "macroscopic" which appear also in smooth contacts. The latter may be related to
interface waves which are observed in large contacts or at small indentation depths. Numerical
simulations were performed using the Boundary Element Method (BEM).
Keywords: adhesion; friction; adhesion hysteresis; Boundary Element Method (BEM); hard solids; soft
matter
1 Introduction
Since the famous work by Johnson, Kendall, and
Roberts (JKR) from 1971 [1], adhesive contacts
have remained in focus of research in contact
mechanics and tribology. In the JKR theory, the
action range of adhesive forces is assumed to be
zero (or much smaller than any characteristic
length of contact). In 1975, Derjaguin, Muller, and
Toporov (DMT) suggested a model in which the
final interaction range was considered explicitly
(in particular, the interaction outside the contact
* Corresponding authors: Valentin L. POPOV, E-mail: v.pop[email protected]; Qiang LI, E-mail: [email protected]

2 Friction
| https://mc03.manuscriptcentral.com/friction
area) [2]. Tabor solved in 1977 the controversy
between both theories stating clearly that the JKR
and DMT theories are limiting cases for very small
and very large range of action of adhesive forces
and introduced a parameter (now known as Tabor
parameter) which describes transition between these
two limiting cases [3]. In the early 2000s, the interest
in adhesive contacts was driven by studying adhesion
in biological adhesion "devices" like in gecko feet
[4] or other biological structures [5]. In the last
years, adhesive contacts have become again a hot
topic, in particular in the context of adhesion of
functionally graded materials [6], the loading-unloading
hysteresis in rough contacts [7] as well as adhesive
contacts under tangential loading [8]. In particular,
rough contacts have been very intensively studied,
for example, evaluation of effective adhesion work
based on the Maugis–Dugdale model [9, 10],
description of rough surfaces and development of
experimental methods [11].
Two developments of the last years greatly
facilitated the advancement in adhesive contact’s
research:
1) The development of the Fast-Fourier-Trans-
formation-assisted Boundary Element Method (FFT-
assisted BEM) [12–14], in particular, its adaptation
for simulation of adhesive contacts [15].
2) The development of experimental methods for
direct observation of the processes of attachment
and detachment [16, 17].
One of the striking experimental findings are
complicated stick–slip dynamics of tangential adhesive
contacts [17]. These are far from being understood
well and are subject of intense debates [18‒20].
The present paper is devoted to an analytical,
numerical, and experimental investigation of adhesive
contacts under tangential loading and rolling. However,
the dissipative properties of normal adhesive contacts
are also considered as far as this helps understanding
friction.
For slow sliding of adhesive contacts, the application
of some force is needed, which can be interpreted
as force of friction. There are two main generic
mechanisms of friction in adhesive contacts: (a)
Either the friction in the boundary line – due to its
unstable sliding as described in Ref. [21], or (b) the
friction directly in the inner part of the contact
area [8, 22]. In the present paper, both mechanisms
are investigated analytically and numerically. For
the former one, the numerical study is conducted
by use of the BEM for the JKR-type adhesive contact.
The analysis is restricted to the elastic contact
under very slow normal and tangential movement
(quasi-static contact), so that viscoelastic and inertia
properties can be neglected.
We will consider both basic types of friction due
to relative movement of bodies: rolling and sliding
friction. These types have important differences
stemming from the different local direction of
movement of surfaces. Pure rolling is essentially a
normal contact problem, because the surfaces at
the leading edge are approaching each other in the
normal direction and on the rear edge they separate
in normal direction, both without any tangential
movement. It is important to note that the absence
of relative tangential movement of surfaces in the
case of a rolling contact suppresses the contribution
from shearing of the contact area, while in a sliding
contact this contribution not only exists but presumably
represents the main contribution to friction in most
cases.
The structure of the paper reflects this understanding.
The first part of the paper is devoted to numerical
simulation of adhesive contacts. Section 2 reports
results on adhesive hysteresis in normal and rolling
contacts. Section 3 considers sliding adhesive contacts
with both boundary and area contributions.
The second part of the paper is devoted to
experimental investigation on the contacts of rigid
indenters and soft rubber. Reported are results for
normal contacts and sliding.
2 Normal and rolling contacts: numerical
simulation
The solution of Johnson, Kendall, and Roberts (JKR)
[1] assumes that the tangential stresses in the
contact area vanish. For ideally smooth surfaces,
this assumption is a logical consequence of the
independence of the potential energy of an adhesive
contact on its lateral position. Real adhesive
contacts, on the contrary, typically show very high
Friction 3
∣www.Springer.com/journal/40544 | Friction
http://friction.tsinghuajournals.com
friction, which physically is caused by microscopic
heterogeneities. However, there exists a class of
adhesive contacts in which the friction in the contact
area could be small. To have this property, the
contacting bodies have to be free of viscosity, plasticity
and should not show elastic instabilities (which,
according to Prandtl, are the main mechanism of
energy dissipation in purely elastic systems [23–25].)
Under these conditions, the surfaces would be in a
state of "structural superlubricity" as described in
[26–28]. The tangential friction in the contact area
does not appear also in the pure normal and
rolling contacts. We therefore start with this class
of dynamic contacts, focusing our attention first on
the boundary contribution to energy dissipation.
2.1 Methodology
Numerical simulations presented in Section 2 were
carried out for adhesive contact of a parabolic
indenter with the radius of curvature R superimposed
with a two-dimensional waviness with amplitude
h and wave length
:
22 2π2π
, sin sin
2
xy
zxy h x y
R (1)
see subplot of Fig. 1(b) for an example. In the
following subsections, simulations were performed
using the FFT-assisted BEM [29] under displacement-
controlled conditions and with the same assumptions
as in JKR theory: The materials behave as linear
elastic half-spaces with surface slopes being low
and adhesion only acts in the regions of intimate
contact. Validation of this method was provided in
[15, 29–31]. Typically, a grid with 512 × 512 points
was used.
2.2 Normal adhesive contact of rough surfaces
Contrary to a non-adhesive contact of elastic bodies,
an adhesive contact has intrinsic dissipative properties,
which can best be seen in a complete cycle of
formation and destruction of contact. The area
between the indentation and detachment branches
of force-displacement relation (e.g., in the JKR theory)
is the dissipated energy per cycle. The JKR theory
is based on the principle of virtual work, meaning
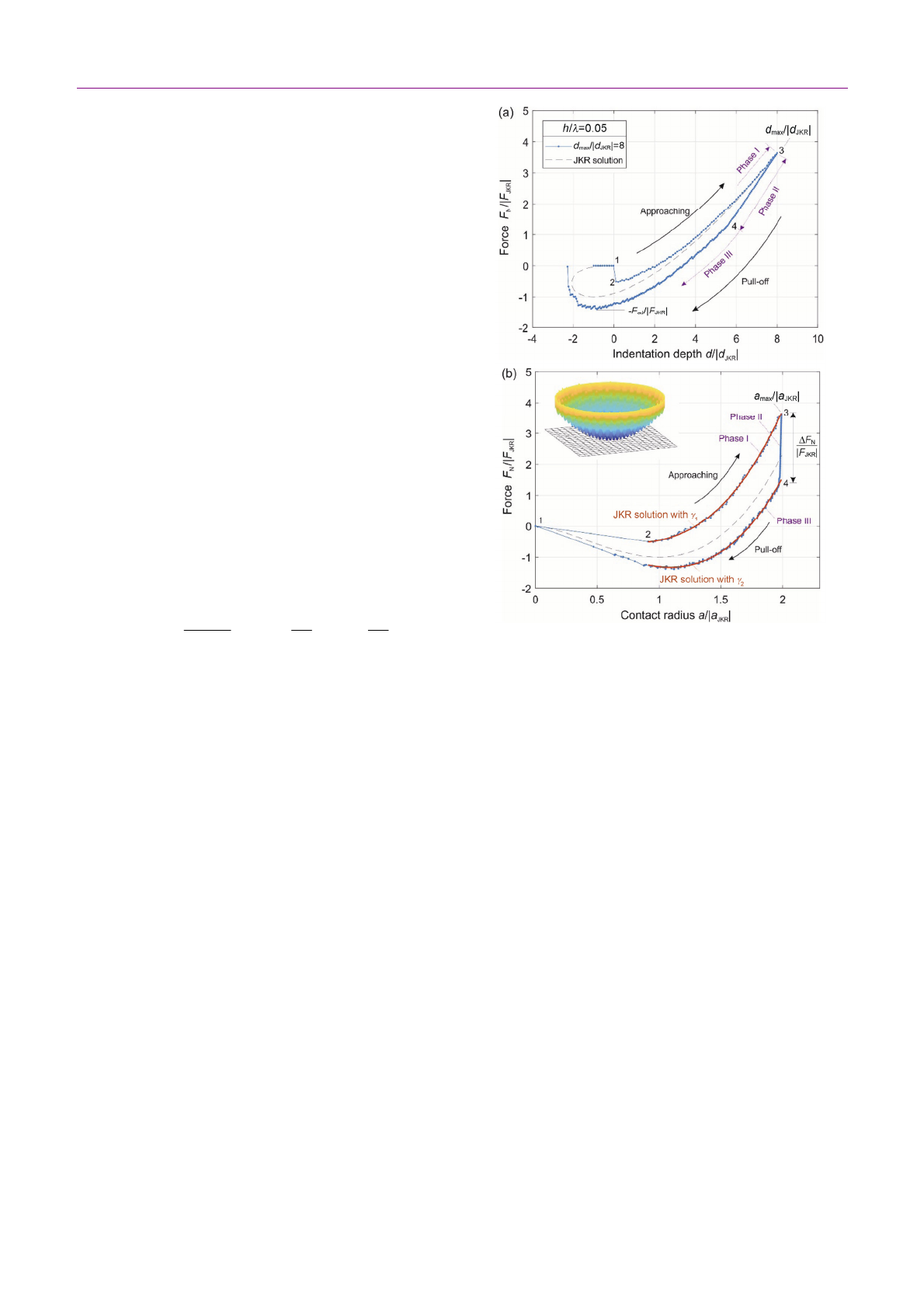
Fig. 1 Simulation of an adhesive indentation test using a
parbolic indenter with waviness according to (1) and h/λ = 0.05.
(a) Force–distance and (b) force–contact radius dependencies
during indenting and pull-off stages. The contact area remains
constant immediately after turning from the indentation to the
pull-off (phase II). The gray dashed curve is the JKR solution
without waviness.
that adhesive contact is reversible in all phases
when static equilibrium is possible [32]. Irreversible
energy dissipation occurs only during the instable
jumps from one equilibrium state to the other. This
occurs in the moments of coming into contact and
in the sudden destruction of contact. Independently
from whether such jumps occur during a normal
or a tangential movement, energy is dissipated.
We therefore start in this Section with discussion
of dissipation in the normal adhesive contacts.
According to the JKR theory, the system jumps into
contact and then moves forth and back on the same
curve. The situation changes for more complicated
shapes. Even for flat-ended stamps with compact
face shape, the detachment may occur in a series of
4 Friction
| https://mc03.manuscriptcentral.com/friction
consecutive instabilities [15]. The same is valid
when surfaces are rough. Our numerical simulations
show that during approach and detachment, the
movement of the contact boundary proceeds in both
continuous changes and instable jumps. Each jump is
irreversible and, in its course, energy is lost. Due to
the multiple microscopic instabilities, the indentation
differs from the detachment curve at all values of the
indentation depth: the dissipation leads to an
apparent “friction” counteracting the movement of
the contact boundary.
Figure 1 shows the results of a simulation of the
indentation and detachment of a parabolic indenter
with superposed waviness into an elastic half-
space. The above mentioned instabilities are clearly
visible in the curves in Fig. 1 as microstructure of
the lines. When observing the evolution of the
contact zone, the corresponding local instabilities
can be clearly identified.
In the following analysis, the normal force FN,
the indentation depth d, and the contact radius a
will be normalized by the critical values of JKR
solution for a smooth sphere [1, 33]:
JKR 0
3π
2
FR
(2)
1/3
22
0
JKR *2
3π
64
R
dE
(3)
1/3
2
0
JKR *
9π
8
R
aE
(4)
where 0
γ is the work of adhesion per unit area
and E* = E/(1–ν2) is the effective elastic modulus of
a half-space with Young's modulus E and Poisson’s
ratio ν.
In 1995, Johnson studied the adhesive contact
between a wavy surface and a half-space [34], and
showed that the distinction between rough and
smooth surfaces is governed by the parameter,
which we now call the "Johnson parameter":
0
22 *
2
πhE
(5)
In the following sections, we show that the
Johnson parameter is an essential governing parameter
for both adhesion and friction.
2.3 Effective surface energies for shrinking and
expanding of adhesive contacts
Figure 1 represents typical simulation results for
the force-indentation and force-contact area relations.
Since the contact boundary is generally non-
circular, we define the contact radius as the distance
from the center of contact to the furthest remote
contact point, independently of whether the contact
area is compact or consists of a "cloud of contact
spots" as shown in the right hand side of Fig. 2(b).
Figure 1 allows to explain general features
which are important for the following analysis:
1) Both indentation and pull-off curves follow
very closely the JKR solutions, shown in Fig. 1(b)
with red lines, but with different values for the
specific work of adhesion. The value 1
γ for the
approach is smaller than 2
γ for pull-off. See Section
2.5 for limitations of this simple picture with
respect to very large roughness values.
2) When the direction of loading changes from
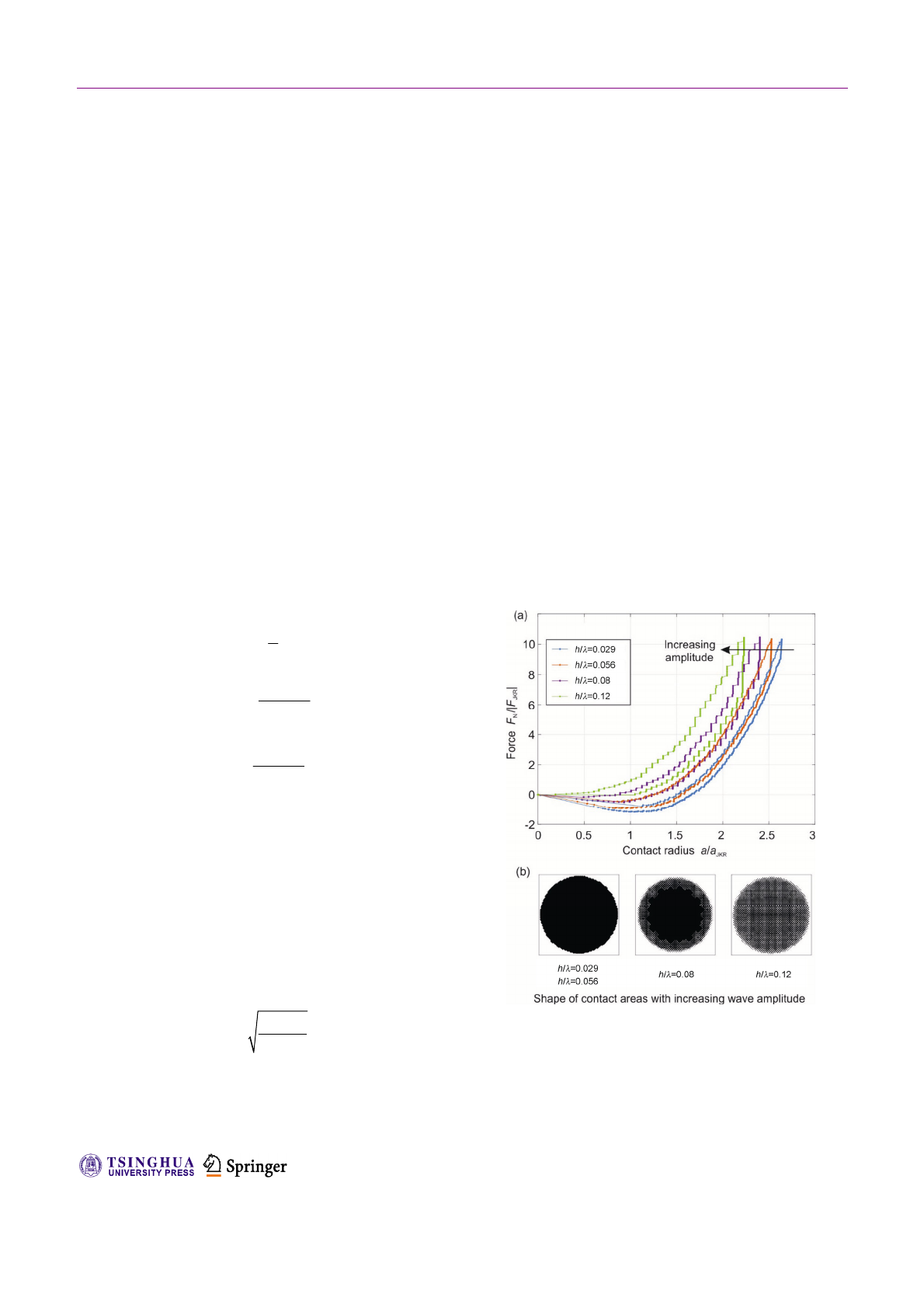
Fig. 2 (a) Dependence of the force on the contact radius, for
four different roughness amplitudes h/λ, varying from 0.029
to 0.12, and for the same maximal indentation depth dmax/
|dJKR| = 15. (b) Shapes of contact areas for different roughness
amplitudes.
Friction 5
∣www.Springer.com/journal/40544 | Friction
http://friction.tsinghuajournals.com
approach to pull-off, the contact area remains
constant for a while. This feature is seen very
clearly in the dependence of force on contact
radius in Fig. 1(b) or Fig. 2(a). The dependence of
force on the indentation depth is linear in this
phase. This behavior is as if a force of static
friction acted on the boundary line, keeping it in
place when the motion of the indentation depth is
reversed. A similar phenomenon is theoretically
described in Ref. [35] where the effect is caused by
microscopic chemical heterogeneities.
The above findings mean that the normal adhesive
contact of rough surfaces can be characterized by
effective energies for approach and pull-off, in
other words for the expansion and retraction of the
contact zone. The values of the effective energies
are expected to approach zero for very rough
surfaces and roughly the microscopic value of the
specific work of adhesion 0
γ for smooth surfaces.
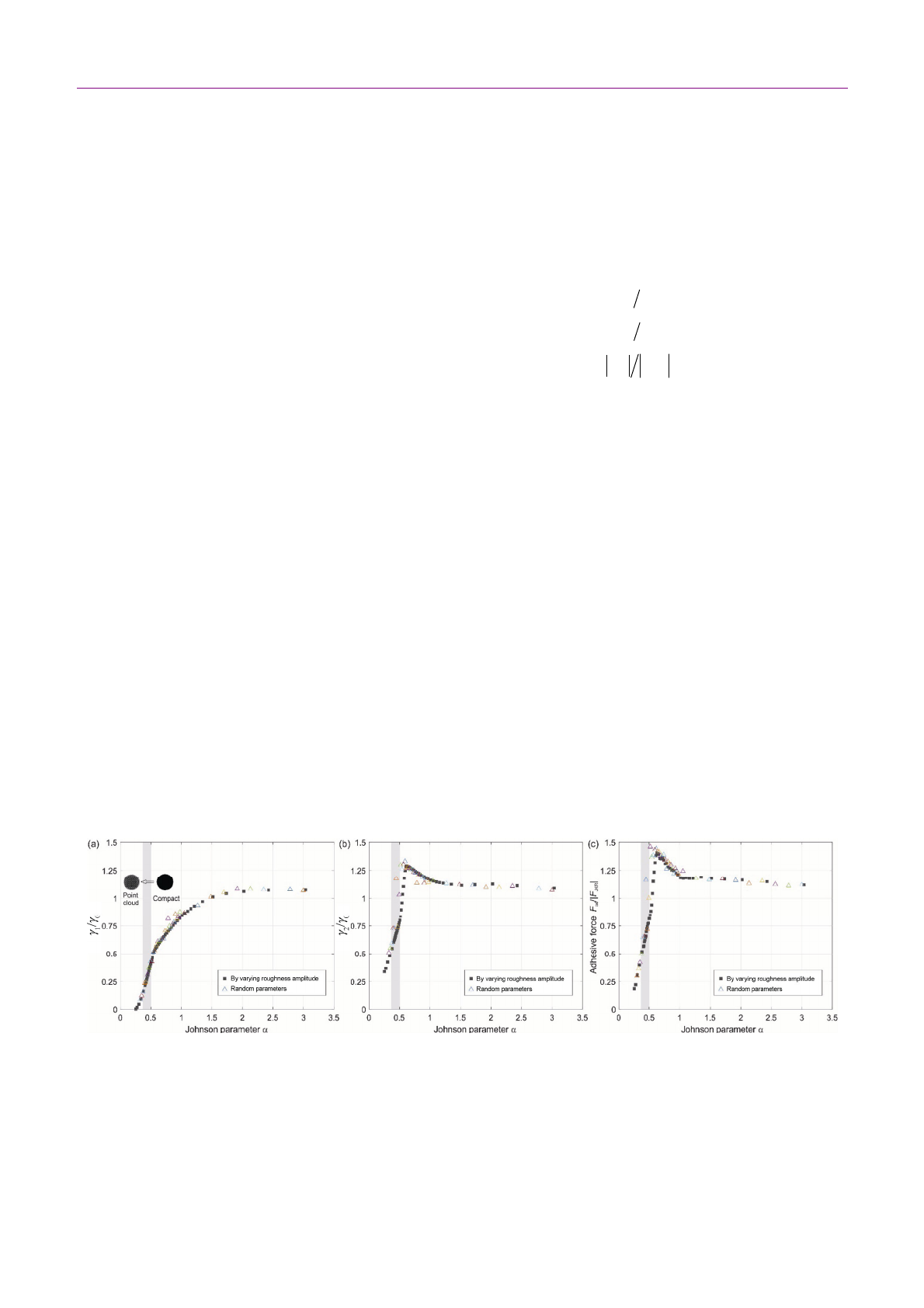
Figure 3 shows the results of systematic parametric
studies of effective specific surface energies 1
γand
2
γ. All data points collapse to well-defined master
curves if the effective energies are plotted as function
of the Johnson parameter [36]. In most simulations,
all parameters have been fixed and only the
roughness amplitude was varied. These results are
plotted in Fig. 3 with gray squares. However, we
also performed a large number of simulations in
which the elastic modulus, the roughness amplitude
and wave-length, and the microscopic specific work
of adhesion 0
γ were varied in a random fashion.
These additional data points provide a proof of the
hypothesis, that the true determining parameter is
the Johnson parameter. They are shown in Fig. 3
with open triangles having different colors for
different sets of parameters.
For the normalized effective surface energies
10
/
γγ and 20
/
γγ, as well as the maximum force
of adhesion |Fad|/|FJKR|, all data points collapse
on a well identified dependencies, confirming that
they depend indeed only on the Johnson parameter:
10 1
()γγ f
(6)
20 2
()γγ f
(7)
ad JKR ()FF
(8)
Let us discuss the above dependencies in more
detail. For large values of the Johnson parameter,
all three dependencies tend towards 1. This is
expected, since higher values of α correspond to
small roughness amplitude, thus approaching an
ideally smooth surface.
An increase of the roughness amplitude corresponds
to a decrease of the Johnson parameter. The effective
specific work of adhesion describing the indentation
phase 1
γ, is continuously decreasing together with
the Johnson parameter. A particularly sharp drop
to almost zero occurs in the vicinity of α = 0.5. A
closer analysis of the contact configuration shows
that this sharp drop is associated with the change
from the compact contact area to a cloud of separated
contact spots. This reaffirms the conclusions from
the original paper by Johnson [34]. For α > 0.5, the
contact area has a relatively well-defined outer
border, and the force–distance dependence can be
accurately described by the regular JKR theory
Fig. 3 Dependence on Johnson parameter of the effective specific work of (a) adhesion γ1 for approach, (b) γ2 for detachment,
and (c) the maximum adhesive force Fad. The gray squares correspond to numerical results by varying only the roughness
amplitude, and the triangles by randomly varied parameters (including roughness amplitude, elastic modulus and specific work
of adhesion γ0). In all cases, the wave length was kept small in comparison to the sphere radius λ/R ranged from 0.005 to 0.0075.
Loading more pages...